

Modulo Sensore di Velocità con funzione di encoder digitale
Il prezzo originale era: 2,56 €.1,97 €Il prezzo attuale è: 1,97 €. Escluso IVA
Modulo Sensore di Velocità con funzione di encoder digitale
Disponibile su ordinazione
Descrizione
[vc_row][vc_column][vc_column_text]
⚙️ Modulo Sensore di Velocità con Encoder Digitale – Descrizione Completa
✅ Cos’è?
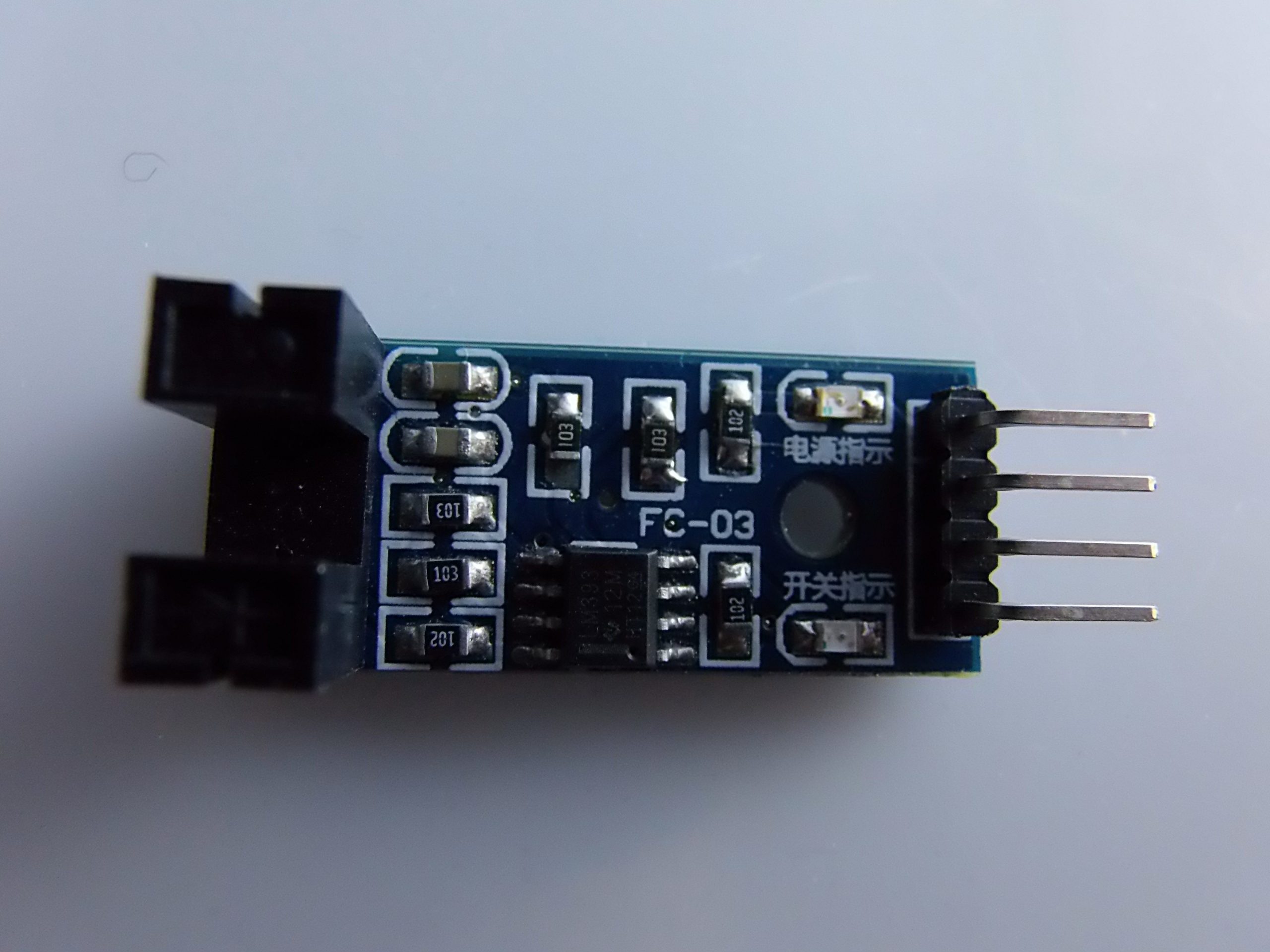
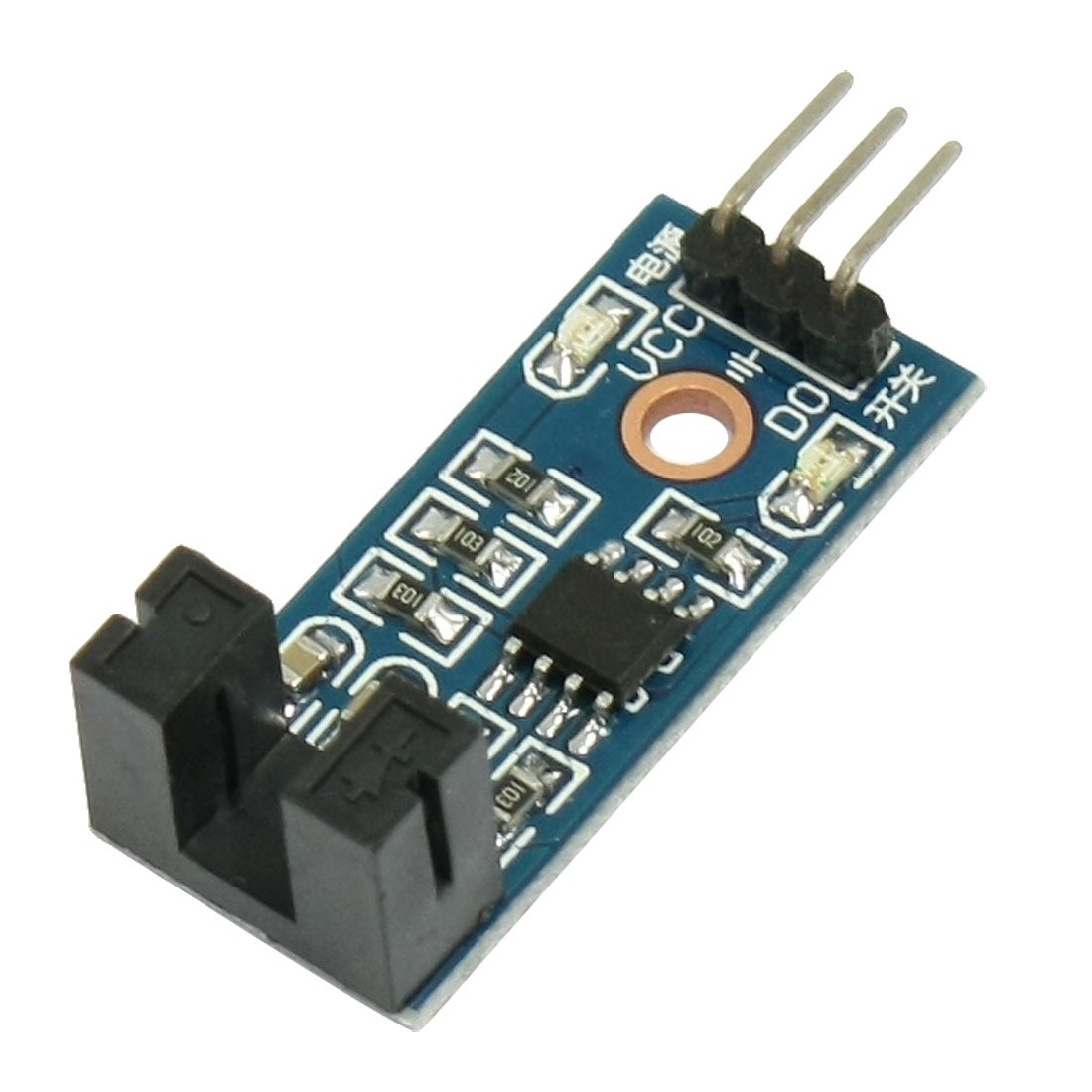
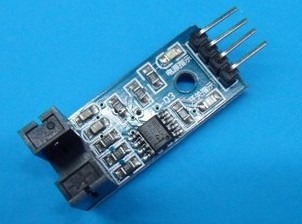
Il Modulo Sensore di Velocità con encoder digitale è un dispositivo progettato per misurare la velocità angolare o la rotazione di un asse (ad esempio ruote motrici) utilizzando un sistema ottico a infrarossi. È comunemente impiegato nei robot mobili, nei sistemi di conteggio rotazioni e nei progetti che richiedono la misura di velocità o distanza percorsa.
🔧 Come funziona
Il modulo sfrutta:
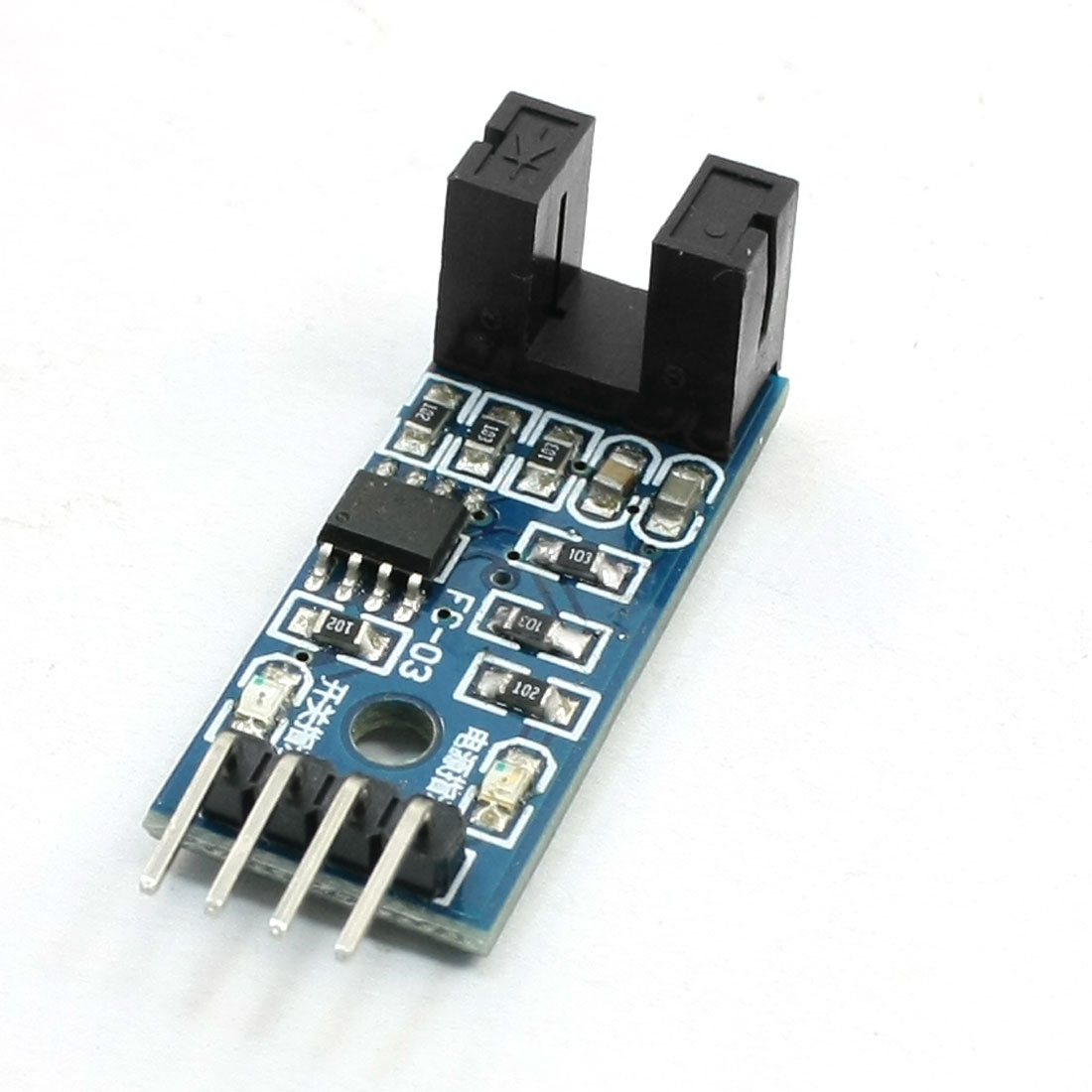
- Un emettitore IR (LED infrarosso)
- Un ricevitore IR (fototransistor)
- Un disco forato o a strisce alternate (encoder ottico)
Quando il disco ruota, i fori o le strisce interrompono il fascio IR, generando impulsi digitali che Arduino può contare per determinare la velocità o la distanza.
🧩 Componenti principali del modulo
- Emettitore + ricevitore IR
- Comparatori per pulire il segnale
- Uscita digitale a onda quadra (HIGH/LOW)
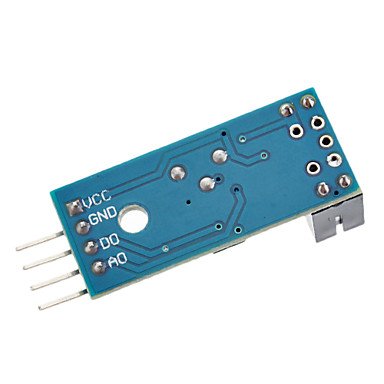
- Interfaccia con 3 o 4 pin (VCC, GND, OUT, a volte anche A0)
- Supporto meccanico per asse/disco
📦 Caratteristiche tecniche
| Caratteristica | Valore |
|---|---|
| Tensione di lavoro | 3.3V – 5V |
| Tipo di segnale | Digitale (impulsi) |
| Uscita | TTL (HIGH/LOW) |
| Frequenza max | ~2kHz (dipende dal disco) |
| Sensore ottico | Infrarosso (850–950nm) |
| Applicazione | Conta giri, velocità, encoder |
🔌 Collegamento con Arduino
🧰 Materiali
- Arduino Uno/Nano/Mega
- Modulo encoder IR
- Disco forato o ruota con strisce nere/bianche
- Cavi jumper
🖇️ Schema di collegamento
| Modulo Encoder | Arduino Pin |
|---|---|
| VCC | 5V |
| GND | GND |
| OUT | D2 (consigliato, pin con interrupt) |
⚠️ Importante: collega OUT a un pin con interrupt hardware (D2 o D3 su Arduino Uno) per conteggio preciso.
👨💻 Codice di esempio base: conteggio impulsi
volatile int impulsi = 0;
void setup() {
pinMode(2, INPUT); // pin OUT encoder
attachInterrupt(digitalPinToInterrupt(2), contaImpulso, RISING);
Serial.begin(9600);
}
void loop() {
Serial.print("Impulsi rilevati: ");
Serial.println(impulsi);
delay(1000);
}
void contaImpulso() {
impulsi++;
}
Ogni impulso corrisponde a un’interruzione del raggio IR, quindi a una “finestra” del disco.
📐 Calcolo velocità e distanza
🧮 Formula (esempio base):
velocita = (impulsi / numero_fessure) * (2 * PI * raggio) / tempo;
Dove:
numero_fessure= quanti fori/strisce ci sono nel discoraggio= raggio ruota in metritempo= tempo tra due letture (in secondi)
🧪 Esempio: velocità lineare
#define FESSURE 20
#define RAGGIO_CM 3.0
volatile int impulsi = 0;
unsigned long tempoPrec = 0;
void setup() {
pinMode(2, INPUT);
attachInterrupt(digitalPinToInterrupt(2), contaImpulso, RISING);
Serial.begin(9600);
}
void loop() {
delay(1000); // campionamento ogni 1 sec
noInterrupts();
int conteggio = impulsi;
impulsi = 0;
interrupts();
float giroRuota = 2 * PI * RAGGIO_CM / 100.0;
float giri = (float)conteggio / FESSURE;
float distanza = giri * giroRuota;
float velocita = distanza / 1.0; // m/s, perché il tempo è 1 sec
Serial.print("Velocità (m/s): ");
Serial.println(velocita);
}
void contaImpulso() {
impulsi++;
}
🔬 Test e calibrazione
- Usa un disco con numero noto di fessure
- Misura il diametro effettivo della ruota
- Verifica la precisione su rotazioni note (es. 1 giro completo = 20 impulsi)
- Se il segnale è instabile, aggiungi un condensatore di decoupling o un filtro software
🧠 Applicazioni pratiche
- 🚗 Robot mobili: calcolo distanza percorsa
- 📦 Nastri trasportatori: conta oggetti o lunghezza
- 🏎️ Auto RC / veicoli autonomi: controllo velocità
- ⚙️ Macchine CNC: encoder per asse di movimento
- ⏱️ Cronometraggio: misure di velocità in fisica sperimentale
📝 Conclusione
✅ Il sensore di velocità con encoder è uno strumento versatile e semplice da usare
✅ Fornisce dati precisi su rotazioni, velocità e distanza
✅ Essenziale nei progetti di robotica, automazione e ingegneria meccanica
Perfetto! Ti fornisco:
✅ Sketch Arduino preconfezionato
per Modulo Sensore di Velocità con Encoder Digitale
🎯 Obiettivo:
Misurare impulsi generati dalla rotazione di una ruota con encoder ottico e calcolare la velocità lineare e la distanza percorsa in metri.
🧪 Sketch completo Arduino
// -------------------------------
// Modulo Encoder Velocità IR
// -------------------------------
#define ENCODER_PIN 2 // Collegato all'uscita digitale del modulo IR
#define NUM_FESSURE 20 // Numero di fessure/strisce sul disco
#define RAGGIO_RUOTA_CM 3.0 // Raggio della ruota in cm
volatile unsigned int impulsi = 0;
unsigned long tempoPrecedente = 0;
const unsigned long intervallo = 1000; // Tempo tra letture (ms)
void setup() {
pinMode(ENCODER_PIN, INPUT);
attachInterrupt(digitalPinToInterrupt(ENCODER_PIN), contaImpulsi, RISING);
Serial.begin(9600);
Serial.println("Sensore Encoder IR Avviato");
}
void loop() {
unsigned long tempoAttuale = millis();
if (tempoAttuale - tempoPrecedente >= intervallo) {
noInterrupts(); // Disattiva gli interrupt per leggere in modo sicuro
unsigned int conteggio = impulsi;
impulsi = 0;
interrupts(); // Riattiva gli interrupt
// Calcolo della distanza e velocità
float giri = (float)conteggio / NUM_FESSURE;
float circonferenza = 2 * PI * RAGGIO_RUOTA_CM / 100.0; // in metri
float distanza = giri * circonferenza; // in metri
float velocita = distanza / (intervallo / 1000.0); // m/s
Serial.print("Impulsi: ");
Serial.print(conteggio);
Serial.print(" | Distanza: ");
Serial.print(distanza, 3);
Serial.print(" m | Velocità: ");
Serial.print(velocita, 3);
Serial.println(" m/s");
tempoPrecedente = tempoAttuale;
}
}
void contaImpulsi() {
impulsi++;
}
🧰 Componenti richiesti per la simulazione Tinkercad
- Arduino Uno
- Modulo sensore di velocità (IR encoder)
- Disco encoder simulato (può essere un pulsante se il disco non è disponibile)
- Cavi jumper
- (Opzionale) Motore DC con ruota
🔧 Simulazione in Tinkercad (alternativa se non hai il disco):
Puoi simulare il sensore usando un pulsante o sensore a infrarossi collegato al pin D2, e ogni pressione simula un “impulso”.
Collegamento:
| Componente | Arduino |
|---|---|
| OUT sensore (o pulsante) | D2 |
| VCC | 5V |
| GND | GND |
|
GENERALI |
MODELLO |
sensore di |
|
MATERIALI |
pcb + componenti |
|
|
COMPATIBILITA’ |
ARDUINO |
|
|
COMPONENTI ELETTRICI |
VOLTAGGIO DI INPUT |
3,3-5V |
|
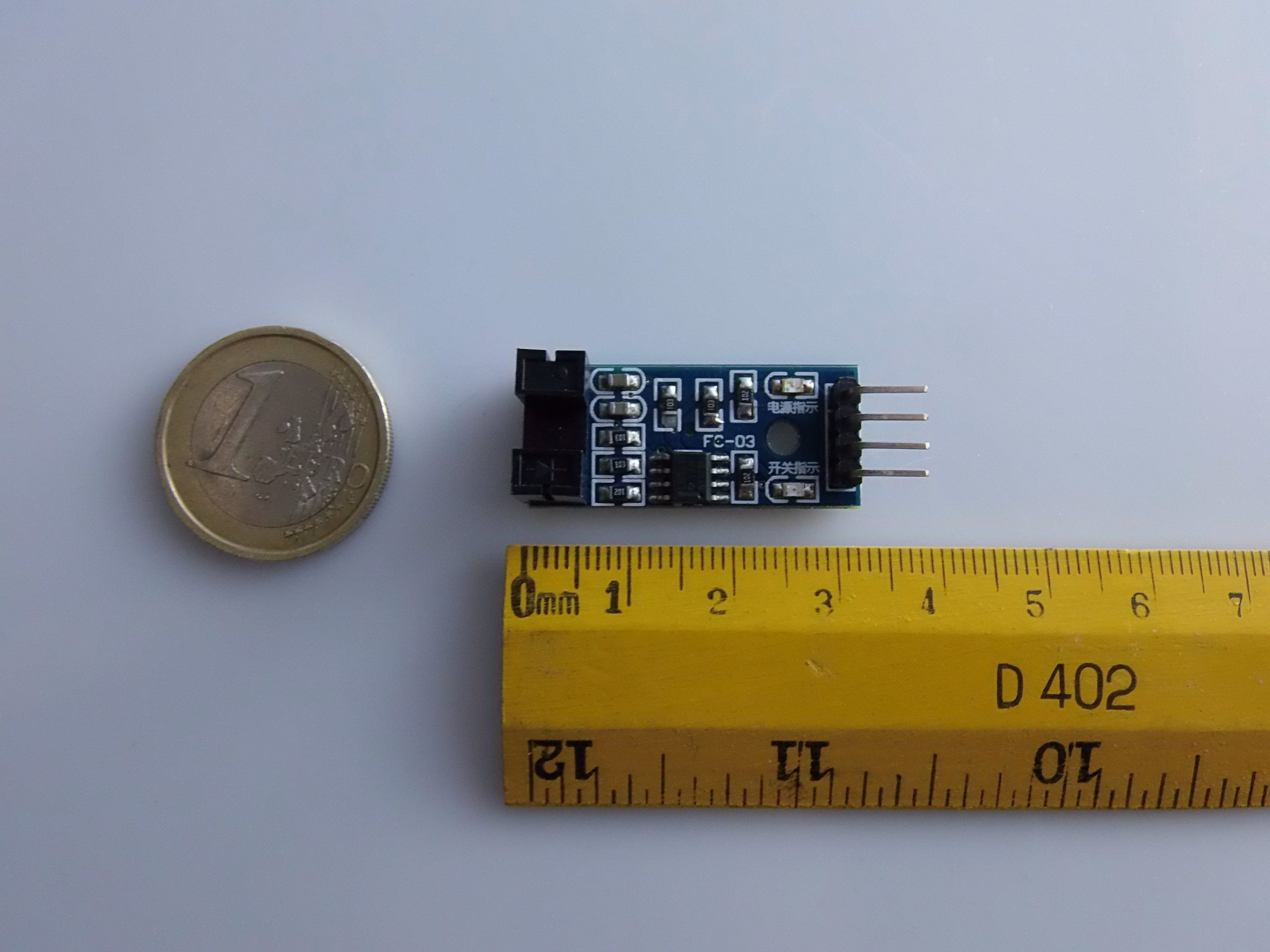
PESO E DIMENSIONI |
PESO DEL PRODOTTO |
7g |
|
PESO DEL PACCHETTO |
0.085 kg |
|
|
DIMENSIONI DEL PRODOTTO (L x W x H) |
4 x 1,5 x 2 cm |
|
|
DIMENSIONI DEL PACCHETTO (L x W x H) |
5 x 3 x 3 cm |
|
|
CONTENUTO DELLA CONFEZIONE |
CONTENUTO DELLA CONFEZIONE |
1 x Modulo |
Abbiamo disponibili la scheda tecnica di tutti i componenti, qualora non fosse presente nella scheda download del prodotto inviaci un messaggio dal modulo contattaci e pubblicheremo la prima possibile nel nostro sito.
< / div>
[/vc_column_text][/vc_column][/vc_row]
Informazioni aggiuntive
| Peso | 14 g |
|---|
Prodotti correlati
-
In offerta!

Nano I/O Scheda Espansione Sensor Shield per Arduino Uno Nano V3 Prototipo Shield
Il prezzo originale era: 3,90 €.2,83 €Il prezzo attuale è: 2,83 €. Escluso IVA Aggiungi al carrello -
In offerta!

Matrice a Led Multicolore RGB Anodo Comune 8×8 60mm 2388RGB
Il prezzo originale era: 11,38 €.8,24 €Il prezzo attuale è: 8,24 €. Escluso IVA Aggiungi al carrello -
In offerta!

Xbee pro shield
Il prezzo originale era: 13,74 €.9,95 €Il prezzo attuale è: 9,95 €. Escluso IVA Aggiungi al carrello -
In offerta!

4 Pezzi 38Khz IR LED Ricevitore Infrarossi Universale TL1838 VS1838B arduino compatibile
Il prezzo originale era: 4,58 €.2,12 €Il prezzo attuale è: 2,12 €. Escluso IVA Aggiungi al carrello
