

Micro Motore Elicottero 6x14mm 3.7V 48000 RPM
Il prezzo originale era: 6,24 €.4,52 €Il prezzo attuale è: 4,52 €. Escluso IVA
Micro Motore Elicottero 6x14mm 3.7V 48000 RPM
Disponibile su ordinazione
Descrizione
[vc_row][vc_column][vc_column_text]
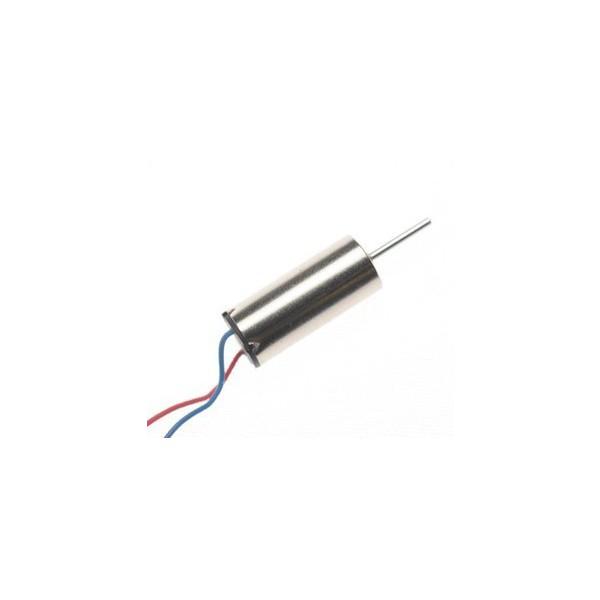
1. Descrizione tecnica del Micro Motore Elicottero 6×14 mm
Nome commerciale comune: Micro DC Coreless Motor 6×14 mm – 3.7 V – 48 000 RPM
Tipologia: Motore DC coreless (senza nucleo ferroso, progettato per alta velocità e leggerezza)
Caratteristiche principali
| Specifica | Valore |
|---|---|
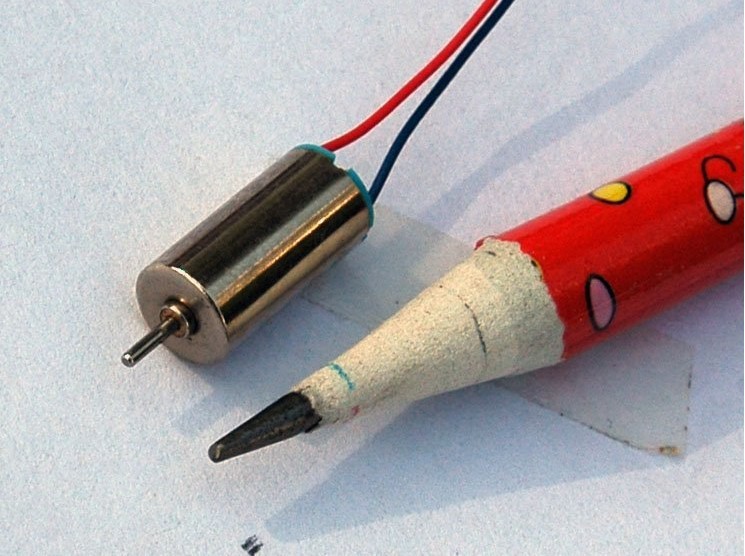
| Diametro | 6 mm |
| Lunghezza | 14 mm (corpo escluso l’albero) |
| Tensione nominale | 3.7 V (compatibile anche con range 3.0–4.2 V) |
| Velocità a vuoto | ≈ 48 000 RPM |
| Corrente a vuoto | ~100–150 mA |
| Corrente di stall | 0.8–1.2 A |
| Tipo albero | Rotondo, Ø ≈ 0.8–1.0 mm |
| Peso | ≈ 1.5–2 g |
| Direzione di rotazione | Dipende dalla polarità di alimentazione |
| Uso tipico | Droni, elicotteri RC, micro ventole, progetti fai-da-te |
💡 Nota: Essendo un motore coreless, ha un’accelerazione molto rapida ma non va alimentato troppo a lungo senza carico per evitare surriscaldamento.
2. Alimentazione e collegamento ad Arduino
Arduino non può alimentare direttamente questo motore dal pin digitale:
- Motori di questo tipo richiedono più corrente (fino a 1 A in spunto) di quella che un pin può fornire (max 40 mA).
- Serve un driver o un transistor di potenza.
Schema di collegamento (con transistor NPN)
Componenti necessari:
- Micro motore 6×14 mm
- Transistor NPN (es. 2N2222 o S8050)
- Diodo di protezione (es. 1N4148 o 1N4007)
- Alimentatore 3.7 V (batteria LiPo o step-down)
- Resistenza da 220–330 Ω per la base del transistor
Collegamenti:
- Collettore → un terminale del motore
- Altro terminale motore → positivo 3.7 V
- Emettitore → GND comune con Arduino
- Resistenza 220 Ω dalla base del transistor → pin digitale Arduino (es. D9)
- Diodo in antiparallelo al motore (catodo al positivo, anodo al collettore)
3. Esempio base di codice (ON/OFF)
int motorPin = 9; // pin collegato alla base del transistor tramite resistenza
void setup() {
pinMode(motorPin, OUTPUT);
}
void loop() {
digitalWrite(motorPin, HIGH); // Avvia il motore
delay(2000); // 2 secondi ON
digitalWrite(motorPin, LOW); // Ferma il motore
delay(2000); // 2 secondi OFF
}
4. Esempio con controllo della velocità (PWM)
int motorPin = 9; // Pin PWM
void setup() {
pinMode(motorPin, OUTPUT);
}
void loop() {
// Accelera gradualmente
for (int speed = 0; speed <= 255; speed += 5) {
analogWrite(motorPin, speed);
delay(50);
}
// Decelera gradualmente
for (int speed = 255; speed >= 0; speed -= 5) {
analogWrite(motorPin, speed);
delay(50);
}
delay(1000); // Pausa
}
💡 Nota: con alimentazione esterna a 3.7 V, il PWM riduce la tensione media applicata, modulando la velocità.
5. Suggerimenti per l’uso sicuro
- Alimentazione stabile: per prestazioni ottimali, usa una batteria LiPo 1S (3.7 V) o un regolatore step-down.
- Protezione termica: evita di far girare il motore a vuoto per lunghi periodi.
- Montaggio: fissalo con supporti leggeri o colla a caldo, evitando deformazioni del corpo.
- Rumorosità: motori coreless ad alta velocità possono essere rumorosi; prevedi smorzamenti se usato in ambienti sensibili.
6. Idee di progetto con Arduino
- Micro ventola controllata da sensore di temperatura
(accende il motore quando il sensore legge oltre una soglia) - Mini elica per modellismo
(pilotata in base alla lettura di un joystick) - Sistema di vibrazione personalizzato
(per segnali di allarme o feedback tattile)
[/vc_column_text][/vc_column][/vc_row]
Informazioni aggiuntive
| Peso | 15 g |
|---|
Prodotti correlati
-
In offerta!

Motore Elettrico miniatura N20 Alta Velocità
Il prezzo originale era: 2,93 €.2,55 €Il prezzo attuale è: 2,55 €. Escluso IVA Aggiungi al carrello -
In offerta!

S3003 Servo Motore Alta Coppia per Futaba RC Auto robo
Il prezzo originale era: 6,84 €.4,95 €Il prezzo attuale è: 4,95 €. Escluso IVA Aggiungi al carrello -
In offerta!

MG90S (misura 9g), ingranaggio metallico inclinazione 14g rispetto alla scatola dello sterzo, versione di aggiornamento SG90
Il prezzo originale era: 6,17 €.4,47 €Il prezzo attuale è: 4,47 €. Escluso IVA Aggiungi al carrello -
In offerta!

Modulo Scheda L293D Motor Driver Stepper Shield 4 Canali Motore Passo Passo per Arduino
Il prezzo originale era: 6,51 €.4,05 €Il prezzo attuale è: 4,05 €. Escluso IVA Aggiungi al carrello
