



Modulo Sensore Infrarossi per Evitamento Ostacoli per Arduino
Il prezzo originale era: 4,57 €.2,11 €Il prezzo attuale è: 2,11 €. Escluso IVA
Modulo Sensore Infrarossi per Evitamento Ostacoli per Arduino
27 disponibili (ordinabile)
Descrizione
[vc_row][vc_column][vc_column_text]
🚗 Modulo Sensore Infrarossi per Evitamento Ostacoli – Descrizione Completa
✅ Cos’è?
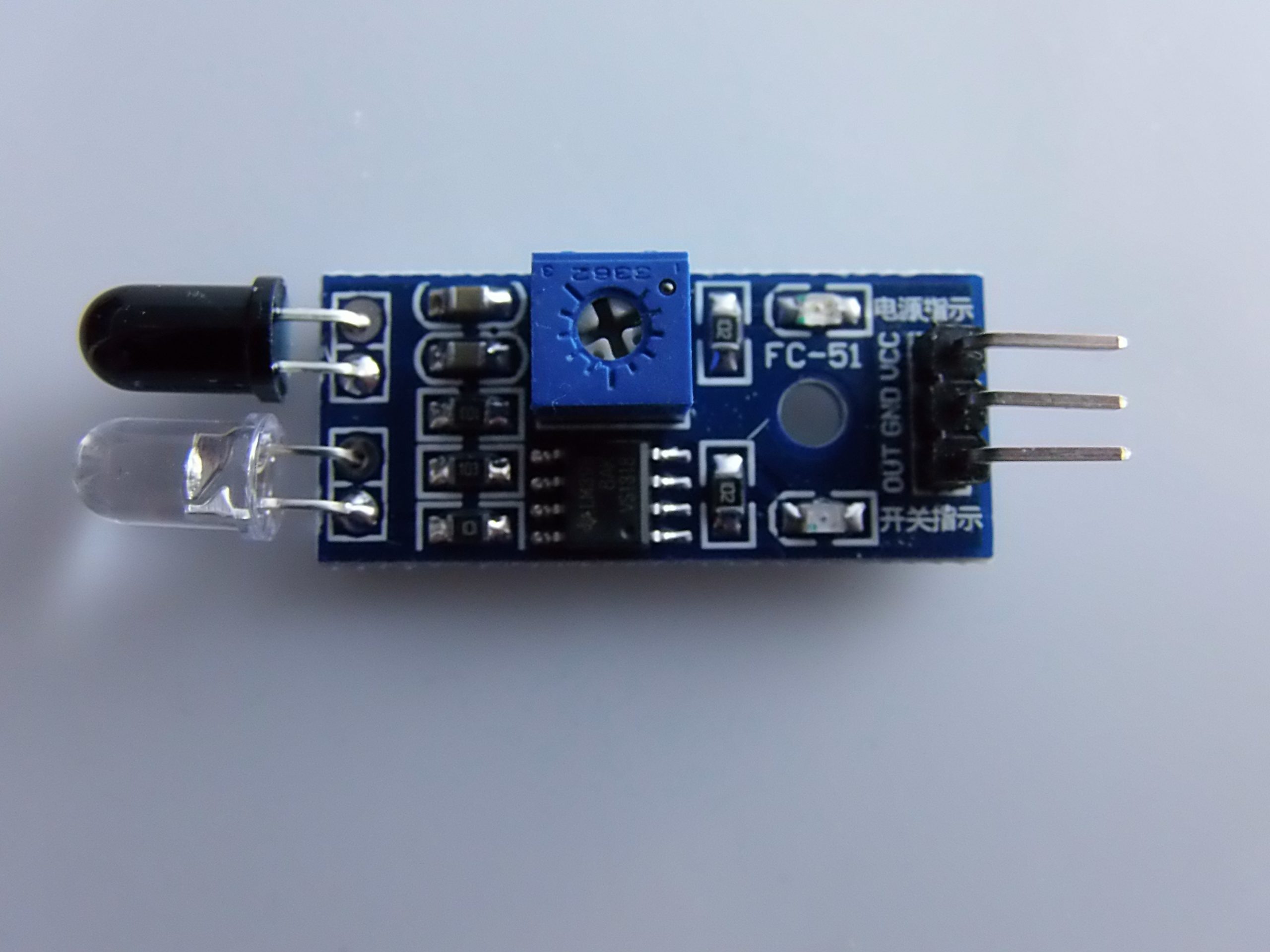
Il Modulo IR per evitamento ostacoli è un sensore a infrarossi che rileva la presenza di oggetti o ostacoli davanti a sé, basandosi sulla riflessione della luce IR. È comunemente usato in robot mobili, auto autonome, dispositivi di conteggio, e in generale in progetti che richiedono il rilevamento di oggetti senza contatto fisico.
🔍 Caratteristiche tecniche
| Specifica | Valore |
|---|---|
| Tensione di funzionamento | 3.3V – 5V DC |
| Distanza di rilevamento | 2 – 30 cm (regolabile) |
| Tipo di uscita | Digitale (HIGH/LOW) |
| Angolo di rilevamento | Circa 35° |
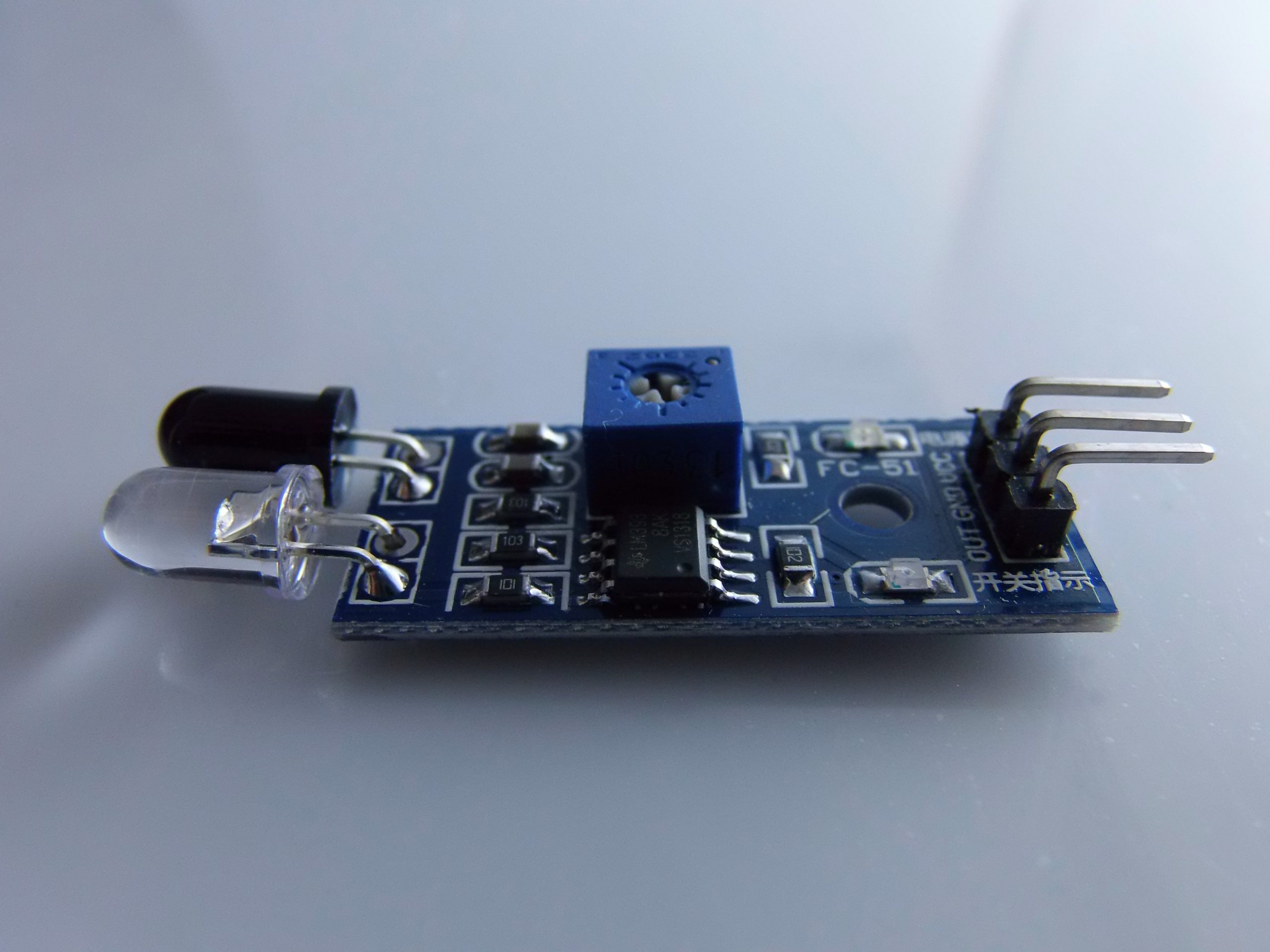
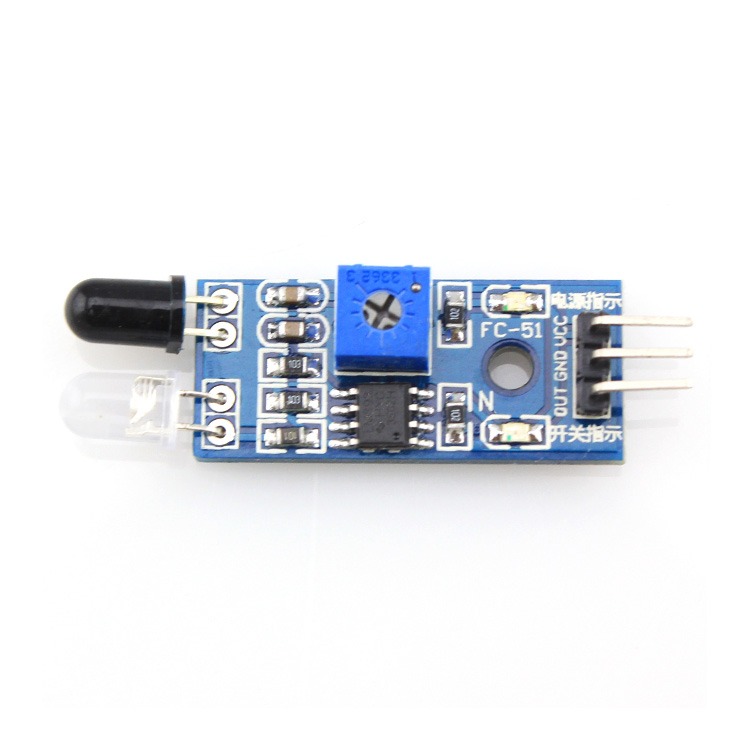
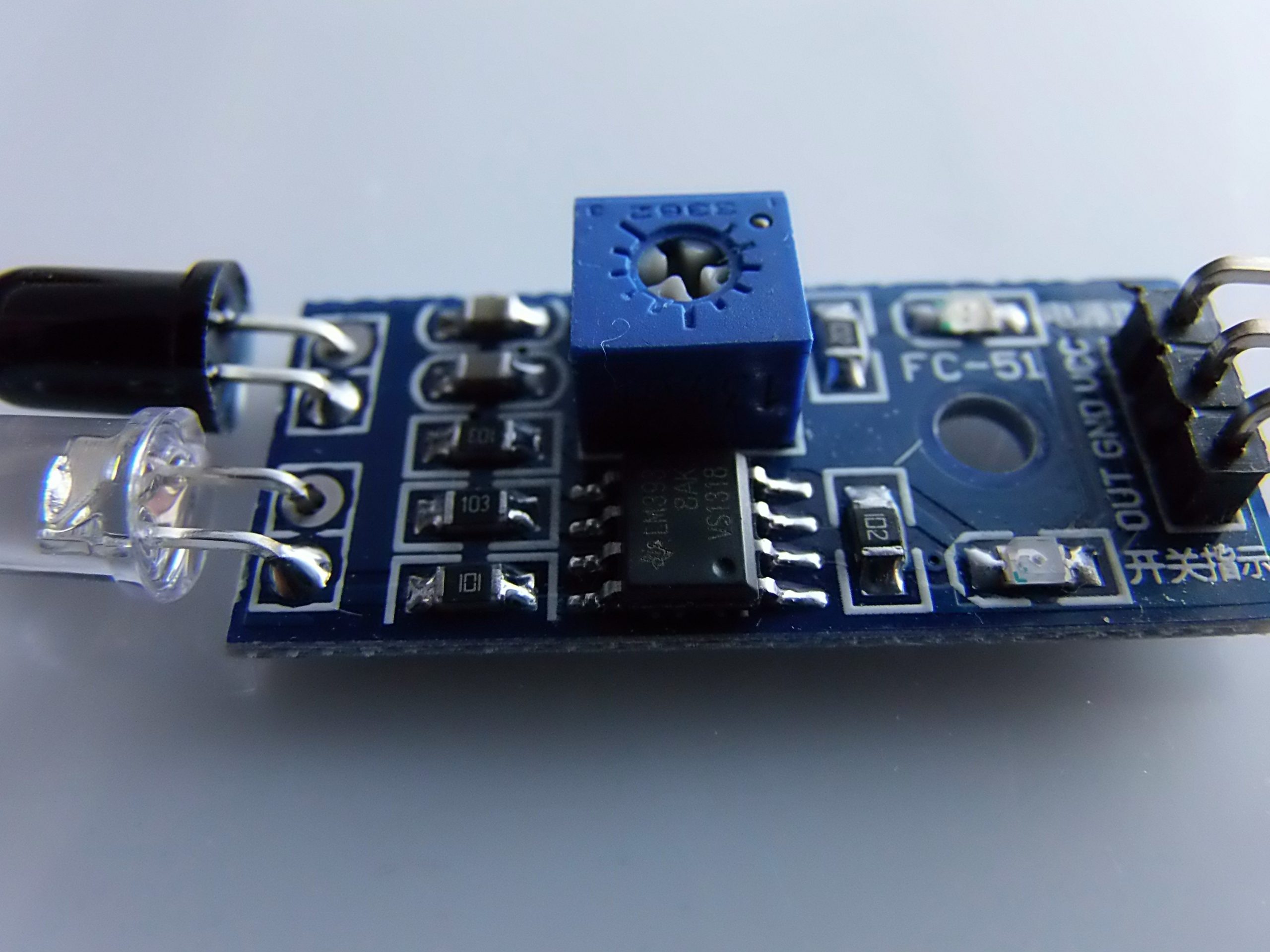
| Componenti principali | LED IR emettitore + ricevitore, LM393 comparator |
| Indicazioni LED | Power LED + LED rilevamento |
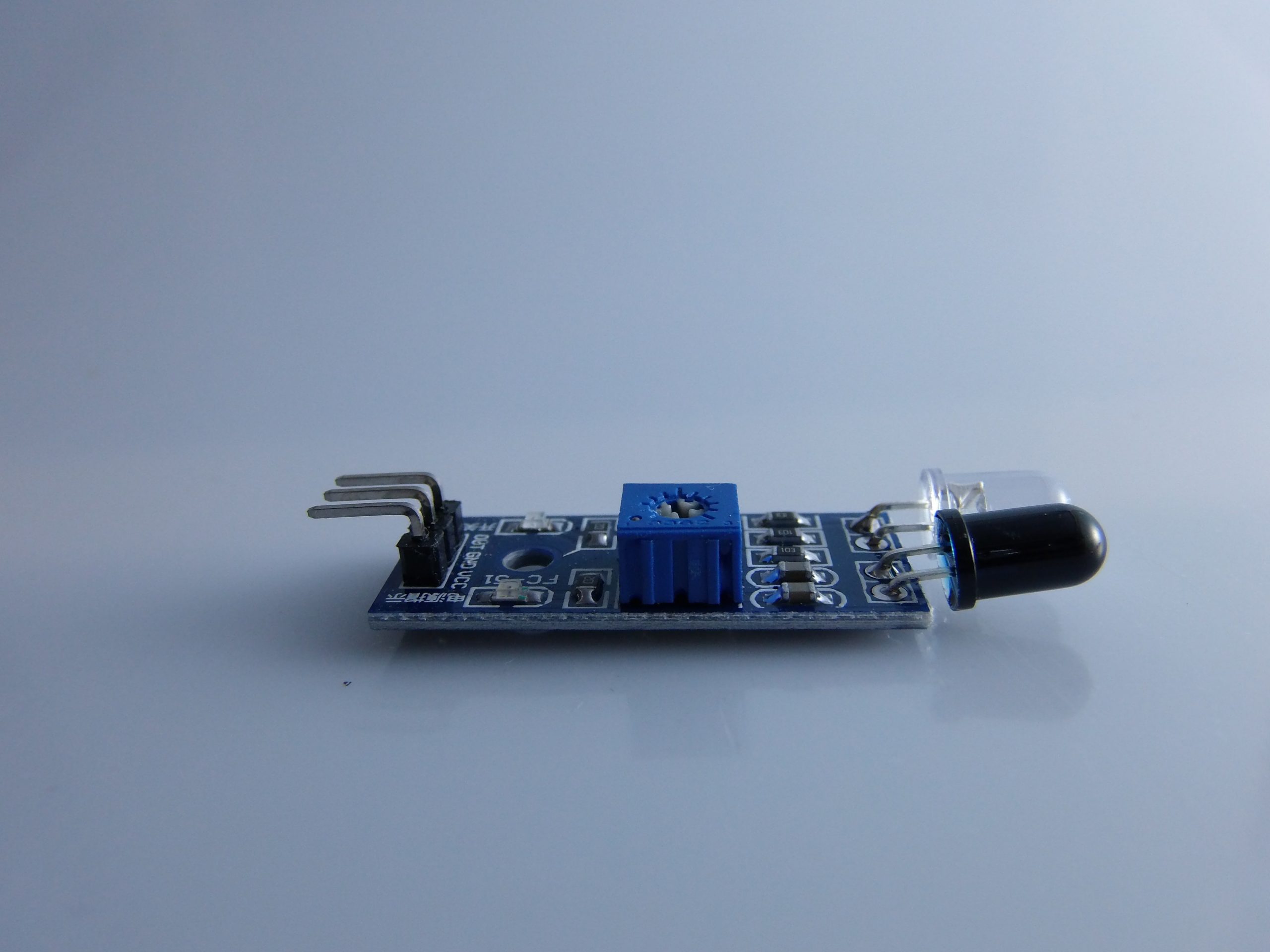
| Interfaccia | 3 pin: VCC, GND, OUT |
| Regolazione sensibilità | Trimmer (vite blu) |
Funziona rilevando la luce IR riflessa: un oggetto vicino riflette il segnale IR emesso e viene rilevato.
🔌 Connessione al tuo Arduino
🧰 Materiale necessario:
- Arduino Uno/Nano/Mega
- Modulo sensore IR evitamento ostacoli
- Cavi jumper
- Breadboard (opzionale)
📌 Schema di collegamento
| Pin modulo IR | Collegamento Arduino |
|---|---|
| VCC | 5V |
| GND | GND |
| OUT | D2 (o qualsiasi pin digitale) |
Il pin OUT fornisce un segnale digitale:
LOWquando viene rilevato un ostacolo.
👨💻 Codice di esempio base
🧪 Obiettivo: accendere un LED su Arduino quando viene rilevato un ostacolo.
#define SENSOR_PIN 2 // OUT del sensore
#define LED_PIN 13 // LED integrato sull'Arduino
void setup() {
pinMode(SENSOR_PIN, INPUT);
pinMode(LED_PIN, OUTPUT);
Serial.begin(9600);
}
void loop() {
int statoSensore = digitalRead(SENSOR_PIN);
if (statoSensore == LOW) {
// Ostacolo rilevato
Serial.println("🚧 Ostacolo rilevato!");
digitalWrite(LED_PIN, HIGH);
} else {
// Nessun ostacolo
digitalWrite(LED_PIN, LOW);
}
delay(100);
}
Nota: In genere il sensore restituisce
LOWquando c’è un oggetto davanti. Verifica sempre con il monitor seriale.
💡 Esempio avanzato: Robot evita ostacoli (con 2 sensori)
Usando due sensori IR per decidere la direzione del movimento.
#define LEFT_SENSOR_PIN 2
#define RIGHT_SENSOR_PIN 3
#define LEFT_MOTOR 8
#define RIGHT_MOTOR 9
void setup() {
pinMode(LEFT_SENSOR_PIN, INPUT);
pinMode(RIGHT_SENSOR_PIN, INPUT);
pinMode(LEFT_MOTOR, OUTPUT);
pinMode(RIGHT_MOTOR, OUTPUT);
}
void loop() {
int leftObstacle = digitalRead(LEFT_SENSOR_PIN);
int rightObstacle = digitalRead(RIGHT_SENSOR_PIN);
if (leftObstacle == LOW && rightObstacle == LOW) {
// Ostacolo davanti → fermati
digitalWrite(LEFT_MOTOR, LOW);
digitalWrite(RIGHT_MOTOR, LOW);
} else if (leftObstacle == LOW) {
// Ostacolo a sinistra → gira a destra
digitalWrite(LEFT_MOTOR, HIGH);
digitalWrite(RIGHT_MOTOR, LOW);
} else if (rightObstacle == LOW) {
// Ostacolo a destra → gira a sinistra
digitalWrite(LEFT_MOTOR, LOW);
digitalWrite(RIGHT_MOTOR, HIGH);
} else {
// Nessun ostacolo → vai avanti
digitalWrite(LEFT_MOTOR, HIGH);
digitalWrite(RIGHT_MOTOR, HIGH);
}
delay(100);
}
In un vero robot,
LEFT_MOTOReRIGHT_MOTORandrebbero collegati a un driver motori (es. L298N o L9110S).
⚙️ Suggerimenti pratici
- 🔧 Regolazione sensibilità: gira il trimmer sul modulo per aumentare o ridurre la distanza di rilevamento.
- 🌞 Condizioni ambientali: la luce solare diretta può interferire col sensore IR. Utilizzalo in ambienti interni o controllati.
- 🔋 Tensione: funziona bene sia con 3.3V che con 5V, ma si consiglia 5V per la massima affidabilità.
🧠 Applicazioni possibili
- Robot mobili autonomi
- Conta-oggetti su nastro trasportatore
- Sensori di prossimità o presenza
- Giochi e interfacce interattive
- Automazione semplice (es. apertura automatica)
📦 Riassunto delle funzionalità
- ✔️ Rilevamento oggetti senza contatto
- ✔️ Semplice da integrare con Arduino
- ✔️ Economico e regolabile
- ✔️ Uscita digitale, facile da leggere
- ✔️ Adatto a progetti educativi e hobbistici
Perfetto! Di seguito ti propongo una presentazione didattica suddivisa in diapositive testuali, adatta per PowerPoint, Google Slides, Canva o qualunque altro strumento di presentazione.
📊 Presentazione: Sensore Infrarossi per Evitamento Ostacoli con Arduino
🔹 Slide 1: Titolo
Sensore IR per Evitamento Ostacoli
Introduzione e uso con Arduino
👨🏫 Corso: Introduzione alla Robotica
📅 Data: [inserire data]
📍 A cura di: [nome docente/studente]
🔹 Slide 2: Cos’è il sensore IR per evitamento ostacoli?
- Sensore che rileva oggetti senza contatto tramite infrarossi
- Usa luce IR riflessa per rilevare la distanza da un ostacolo
- Uscita digitale: HIGH = nessun ostacolo, LOW = ostacolo presente
- Ideale per robot mobili, automazione, sistemi di allarme
🔹 Slide 3: Componenti principali del modulo
- LED IR emettitore
- Fotodiodo IR ricevitore
- Comparatore LM393 per gestione logica
- LED di stato (Power + Detezione)
- Trimmer per regolare la sensibilità
- 3 Pin: VCC, GND, OUT
🔹 Slide 4: Caratteristiche tecniche
| Caratteristica | Valore |
|---|---|
| Tensione | 3.3V – 5V |
| Distanza operativa | 2 – 30 cm (regolabile) |
| Tipo di uscita | Digitale (LOW = ostacolo) |
| Angolo di rilevamento | ~35° |
| Regolazione | tramite trimmer integrato |
🔹 Slide 5: Collegamento con Arduino
Modulo IR ➡️ Arduino
| IR Pin | Arduino Pin |
|---|---|
| VCC | 5V |
| GND | GND |
| OUT | D2 (esempio) |
📌 Uscita digitale: usa digitalRead() per leggere lo stato
🔹 Slide 6: Codice di esempio base
#define SENSOR_PIN 2
#define LED_PIN 13
void setup() {
pinMode(SENSOR_PIN, INPUT);
pinMode(LED_PIN, OUTPUT);
Serial.begin(9600);
}
void loop() {
int stato = digitalRead(SENSOR_PIN);
if (stato == LOW) {
digitalWrite(LED_PIN, HIGH);
Serial.println("Ostacolo rilevato!");
} else {
digitalWrite(LED_PIN, LOW);
}
delay(100);
}
🔹 Slide 7: Applicazione robot evita ostacoli
- Due sensori: uno a sinistra, uno a destra
- Se rilevano ostacoli → il robot gira
- Controllo motori via driver L298N o simili
- Movimento autonomo e intelligente
🔹 Slide 8: Esempi di applicazione
✅ Robot mobili autonomi
✅ Sistemi di allarme o presenza
✅ Conta-oggetti su nastri trasportatori
✅ Giochi interattivi (es. inseguimento)
✅ Sensori per apertura porte
🔹 Slide 9: Suggerimenti pratici
- Evita luce solare diretta per affidabilità
- Regola la distanza con il trimmer integrato
- Può essere alimentato a 3.3V o 5V
- Testa con oggetti chiari/scuri per valutare sensibilità
🔹 Slide 10: Conclusioni
🎯 Sensore economico, semplice e potente
💡 Ottimo per progetti didattici e prototipi
🔧 Facilmente integrabile con altri moduli (relè, motori, LED, buzzer)
👩💻 Utile per introdurre studenti alla programmazione embedded
|
GENERALI |
MODELLO |
Modulo Dolly per evitare ostacoli a infrarossi |
|
MATERIALI |
pcb + componenti |
|
|
COMPATIBILITA’ |
ARDUINO |
|
|
COMPONENTI ELETTRICI |
VOLTAGGIO DI INPUT |
3,3-5V |
|
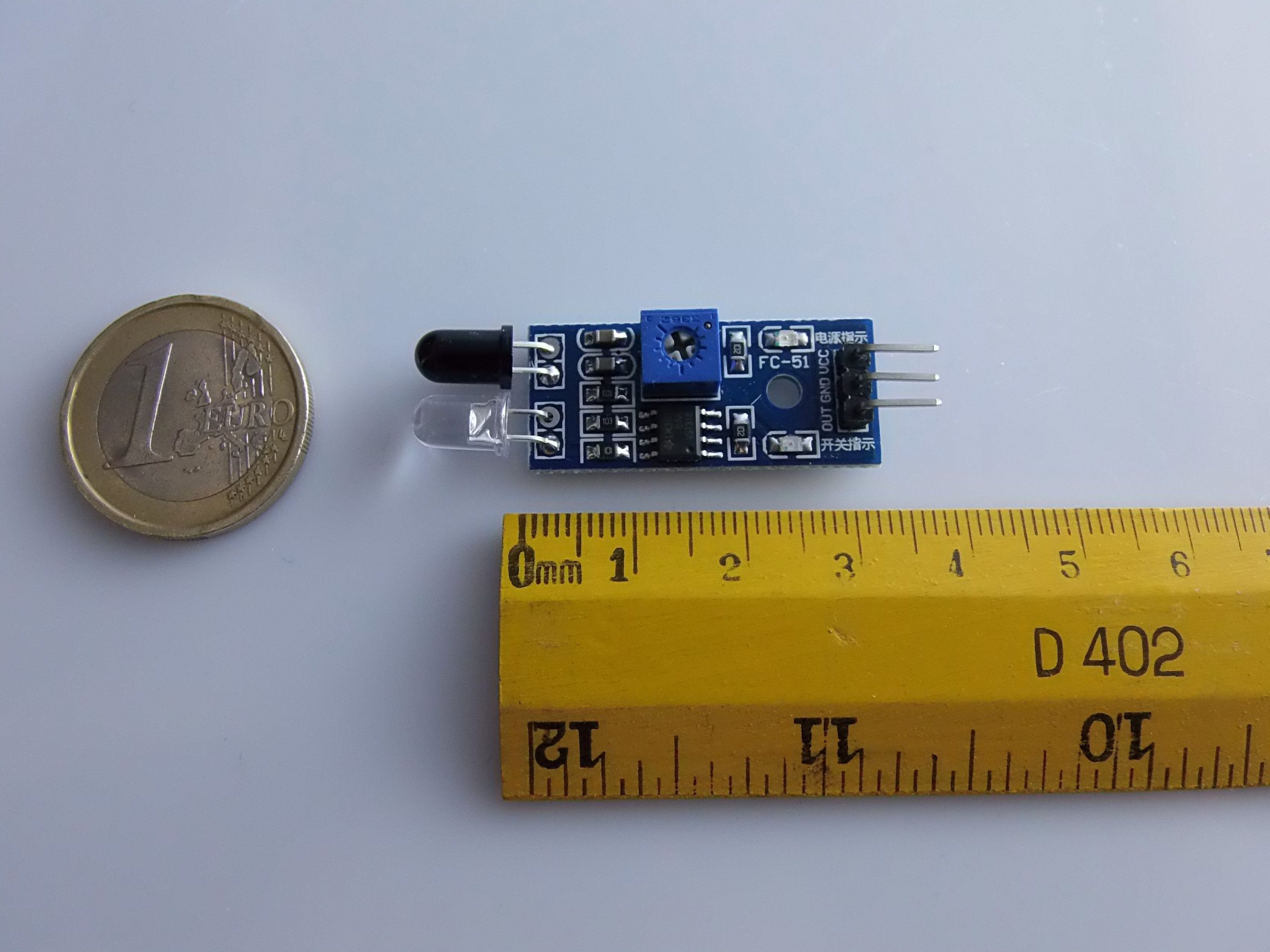
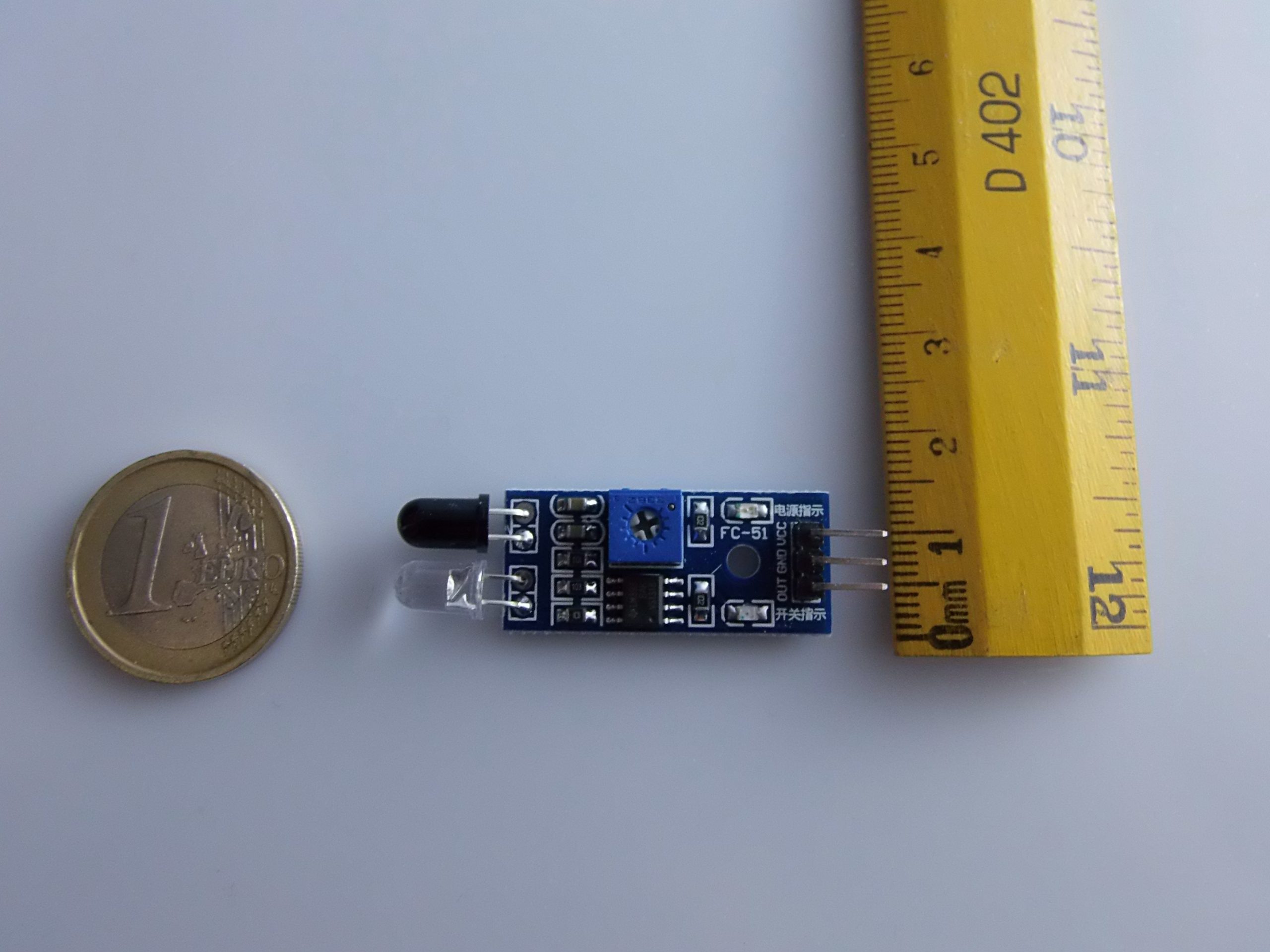
PESO E DIMENSIONI |
PESO DEL PRODOTTO |
8g |
|
PESO DEL PACCHETTO |
0.1 kg |
|
|
DIMENSIONI DEL PRODOTTO (L x W x H) |
5 x 1.5 x 1.5 cm |
|
|
DIMENSIONI DEL PACCHETTO (L x W x H) |
5 x 3 x 2 cm |
|
|
CONTENUTO DELLA CONFEZIONE |
CONTENUTO DELLA CONFEZIONE |
1 x Modulo |
Abbiamo disponibili datasheet di tutti i componenti, qualora non fosse presente nella scheda download del prodotto inviaci un messaggio dal modulo contattaci e lo pubblicheremo il prima possibile nel nostro sito.
[/vc_column_text][/vc_column][/vc_row]
Informazioni aggiuntive
| Peso | 14 g |
|---|
Prodotti correlati
-
In offerta!

Mifare RC522 Lettore antenna | RF Modulo | RFID |
Il prezzo originale era: 14,34 €.10,24 €Il prezzo attuale è: 10,24 €. Escluso IVA Aggiungi al carrello -
In offerta!

Xbee pro shield
Il prezzo originale era: 13,74 €.9,95 €Il prezzo attuale è: 9,95 €. Escluso IVA Aggiungi al carrello -
In offerta!

4 Pezzi Scheda Bianca Compatibile con RFID NFC 13.56MHz Scrivibile Memoria 8kbit
Il prezzo originale era: 4,80 €.2,34 €Il prezzo attuale è: 2,34 €. Escluso IVA Aggiungi al carrello -
In offerta!

Modulo registrazione suono voce ISD1820 Riproduzione Suono (microfono integrato) Vwersione con PCB Blu
Il prezzo originale era: 8,20 €.5,94 €Il prezzo attuale è: 5,94 €. Escluso IVA Aggiungi al carrello
