In offerta!





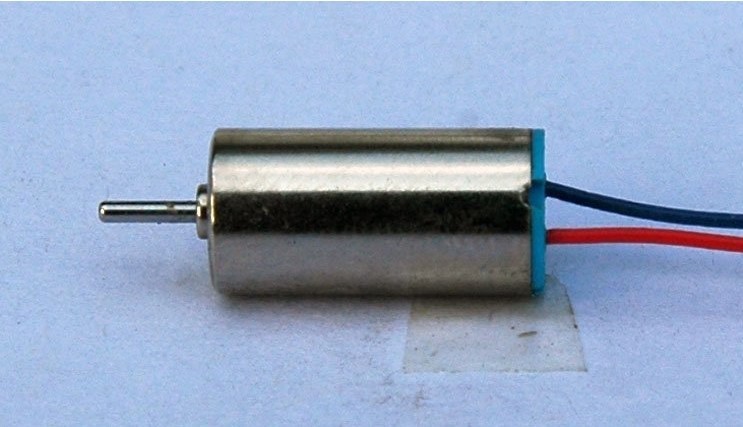
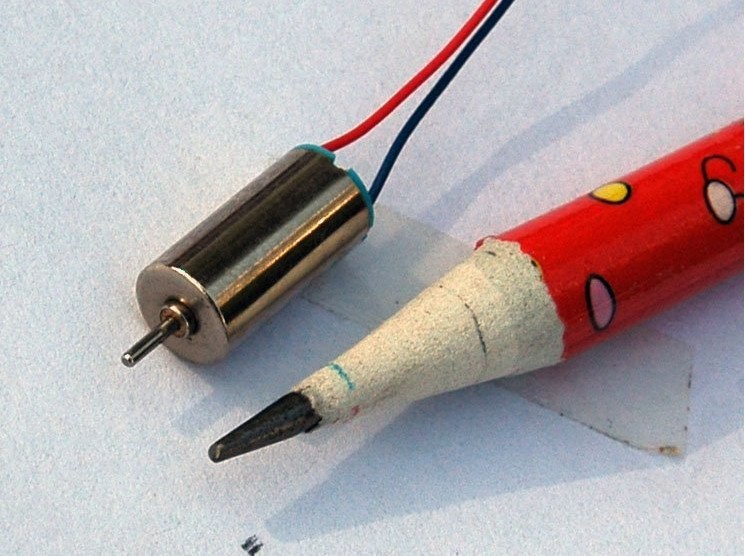
Micromotore per elicottero diametro da 7mm con velocità superiore a 2 Watt
Il prezzo originale era: 3,72 €.2,70 €Il prezzo attuale è: 2,70 €. Escluso IVA
Micromotore per elicottero diametro da 7mm con velocità superiore a 2 Watt
Disponibile su ordinazione
Descrizione
[vc_row][vc_column][vc_column_text]
Descrizione tecnica – Micromotore per elicottero Ø 7 mm (> 2 W)
Tipologia: Micromotore DC coreless (senza ferro) per applicazioni aeromodellistiche.
Applicazione tipica: Elicotteri RC, micro droni, piccoli robot volanti.
Caratteristiche generali:
- Diametro: 7 mm (lunghezza tipica 16–20 mm, escluso albero)
- Peso: ~1,5–2 g
- Albero: diametro 0,8–1,0 mm, lunghezza 3–5 mm
- Tensione di alimentazione: 3,7 V nominale (LiPo 1S)
- Potenza: > 2 W (picco 2,5–3 W)
- Velocità: 45 000–55 000 RPM a vuoto (3,7 V)
- Corrente a vuoto: 0,2–0,3 A
- Corrente a pieno carico: 0,8–1,2 A
- Durata tipica: 5–15 ore di uso continuo a pieno carico (motore ad alta velocità)
Vantaggi:
- Estremamente leggero e compatto
- Risposta rapida grazie al rotore senza ferro
- Alta potenza in rapporto al peso
Svantaggi:
- Consumo elevato → serve batteria capace di fornire picchi di corrente
- Usura rapida a causa dell’alta velocità
- Non adatto per funzionamento prolungato al massimo regime senza raffreddamento
Utilizzo con Arduino
Un motore DC di questo tipo non può essere collegato direttamente ad Arduino perché:
- La corrente richiesta supera quella che i pin di Arduino possono fornire.
- È necessaria una gestione PWM (modulazione di larghezza di impulso) tramite un driver o MOSFET.
Componenti necessari
- Arduino Uno / Nano / Pro Mini
- Driver per motori DC:
- Opzione economica: modulo MOSFET IRLZ44N o simile (logica TTL)
- Opzione modulare: driver L9110S, DRV8833, o TB6612FNG
- Batteria: LiPo 1S 3,7 V con almeno 500–800 mAh, capace di erogare ≥ 1,5 A continui
- Diodo di protezione (flyback) 1N5819 o simile
- Condensatore da 100 µF vicino al motore per ridurre disturbi
Collegamento elettrico (esempio con MOSFET IRLZ44N)
[Arduino Pin PWM D9] → Gate MOSFET
[Drain MOSFET] → Polo negativo motore
[Source MOSFET] → GND comune Arduino + batteria
[Polo positivo motore] → +3,7 V batteria
[Diodo 1N5819] in parallelo al motore (catodo su +, anodo su -)
Esempio di codice Arduino (controllo velocità PWM)
// Pin di controllo del motore
const int motorPin = 9; // Pin PWM
void setup() {
pinMode(motorPin, OUTPUT);
}
void loop() {
// Accende il motore gradualmente
for (int speed = 0; speed <= 255; speed++) {
analogWrite(motorPin, speed);
delay(10); // Rampa lenta
}
delay(2000); // Motore al massimo per 2 secondi
// Spegnimento graduale
for (int speed = 255; speed >= 0; speed--) {
analogWrite(motorPin, speed);
delay(10);
}
delay(2000); // Pausa
}
Esempi di utilizzo
- Micro-elicottero RC fai-da-te → controllo del rotore principale con PWM per variare la spinta.
- Ventola di raffreddamento miniaturizzata → controllo della velocità in base alla temperatura.
- Esperimenti di aerodinamica → test di pale e rotori in laboratorio.
- Mini hovercraft → due motori da 7 mm per spinta e direzione.
Consigli pratici
- Usa sempre alimentazione separata per il motore e Arduino (ma con GND comune).
- Evita di far girare il motore a vuoto per lunghi periodi a piena potenza: può surriscaldarsi.
- Installa un condensatore da 100 nF direttamente sui terminali del motore per ridurre disturbi RF.
- Se vuoi un controllo più fine della velocità, considera driver con feedback e sensori di giri.
[/vc_column_text][/vc_column][/vc_row]
Informazioni aggiuntive
| Peso | 15 g |
|---|
Prodotti correlati
-
In offerta!

Servo motore MG995 55G coppia 13KG ingranaggi in metallo Arduino
Il prezzo originale era: 10,25 €.7,79 €Il prezzo attuale è: 7,79 €. Escluso IVA Aggiungi al carrello -
In offerta!

755 Motore Alta Velocità 6V 14V 22022 RPM
Il prezzo originale era: 16,56 €.12,00 €Il prezzo attuale è: 12,00 €. Escluso IVA Aggiungi al carrello -
In offerta!

Motore elettrico DIYM30 doppio asse per elicotteri aeromodellismo
Il prezzo originale era: 1,96 €.1,70 €Il prezzo attuale è: 1,70 €. Escluso IVA Aggiungi al carrello -
In offerta!

Adattatore per Modulo Wireless 8 Pin NRF24L01 2,4 Ghz compatibile con Arduino
Il prezzo originale era: 2,56 €.1,97 €Il prezzo attuale è: 1,97 €. Escluso IVA Aggiungi al carrello
