



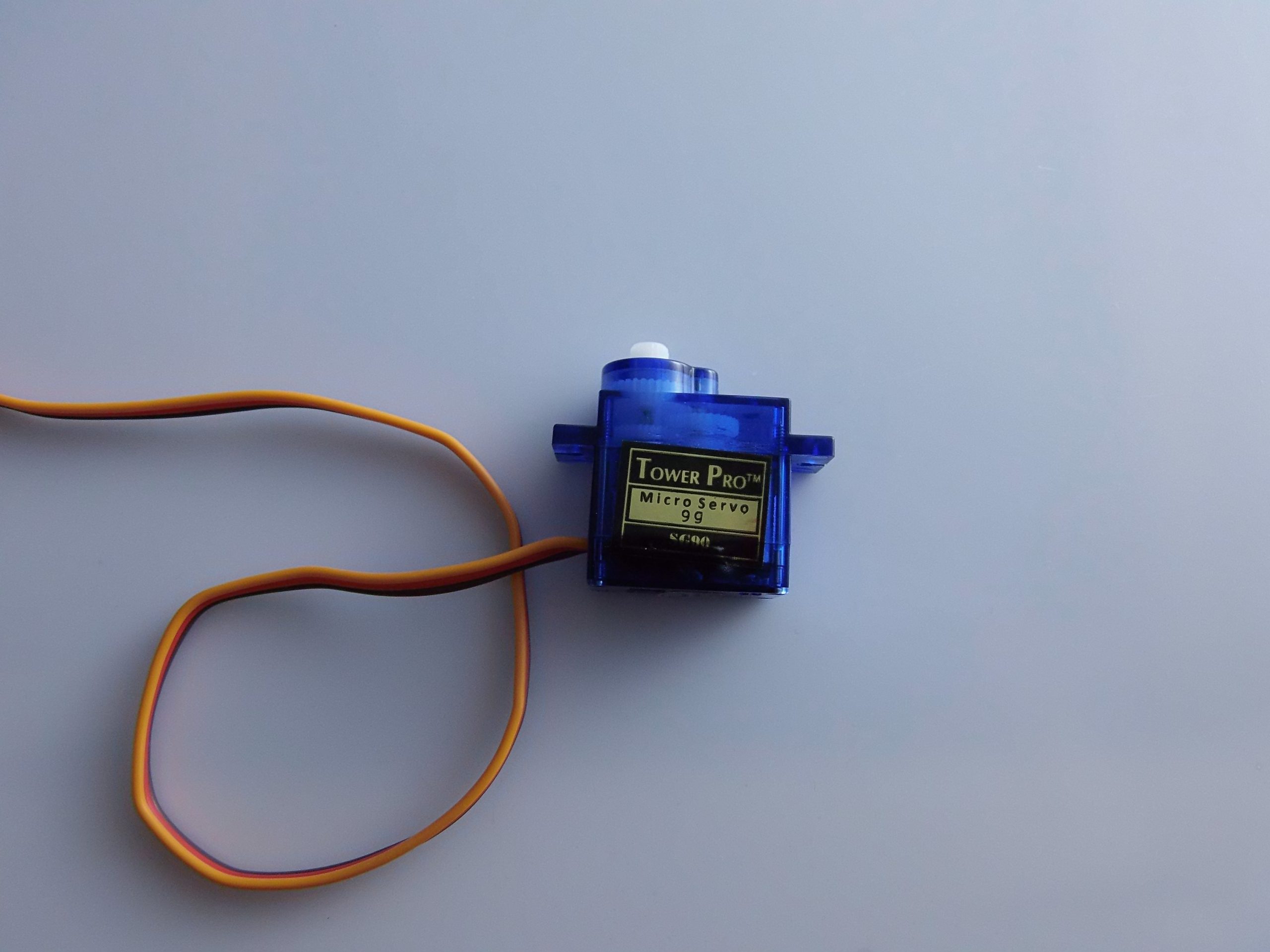

Micro servo 9g SG90 Motore per modellismo RC elicotteri aerei robotica amatoriale arduino
Il prezzo originale era: 6,46 €.4,00 €Il prezzo attuale è: 4,00 €. Escluso IVA
Micro servo 9g SG90 Motore per modellismo RC elicotteri aerei robotica amatoriale arduino
44 disponibili (ordinabile)
Descrizione
[vc_row][vc_column][vc_column_text]
🛠 Descrizione Completa del Micro Servo 9g SG90
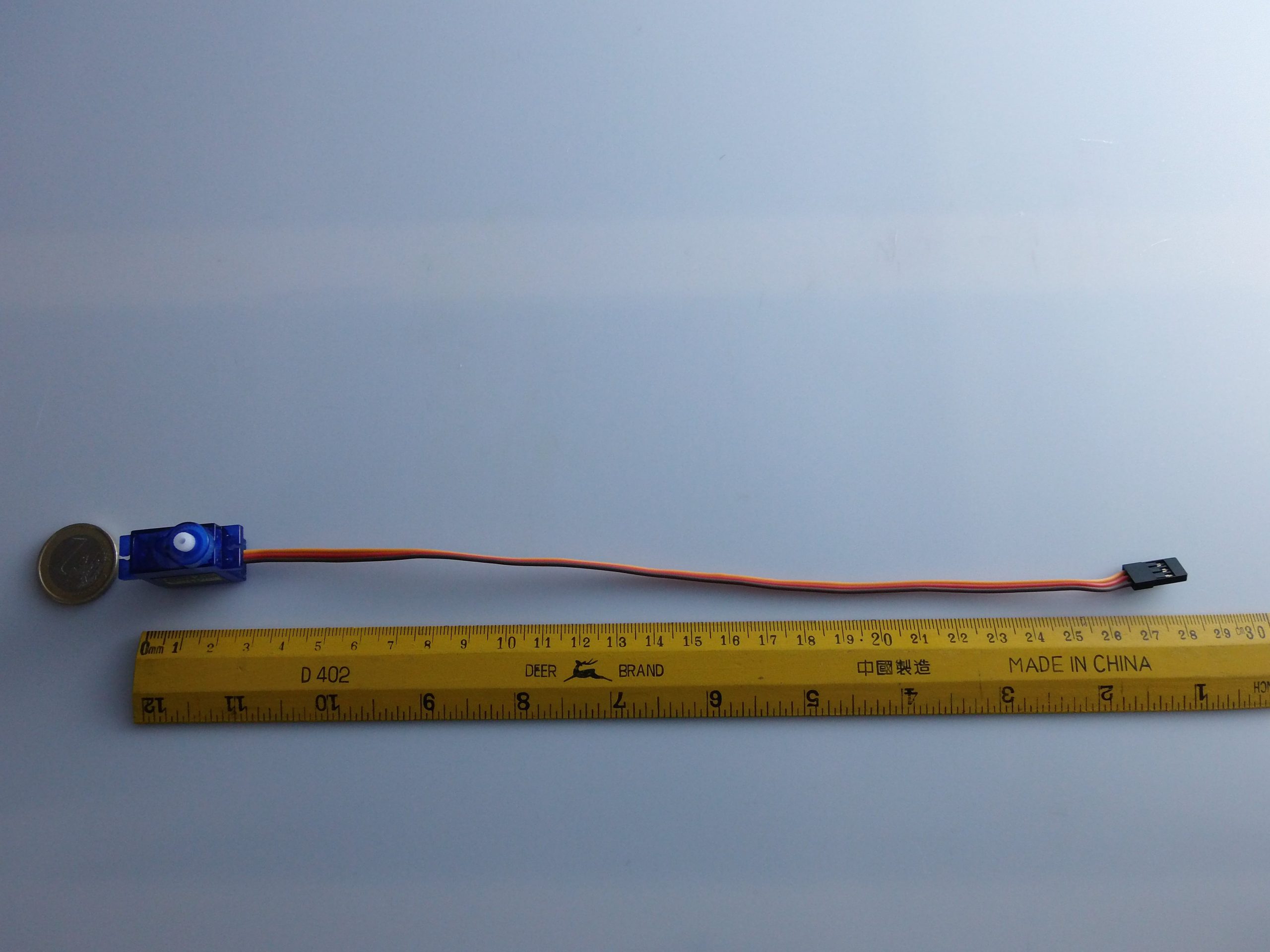
Il Micro Servo SG90 9g è un piccolo servo motore utilizzato comunemente in modellismo RC (elicotteri, aerei), robotica amatoriale, progetti con Arduino e automazione fai-da-te. È apprezzato per la sua leggerezza, basso costo e semplicità d’uso.
✅ Caratteristiche Tecniche:
| Specifica | Valore |
|---|---|
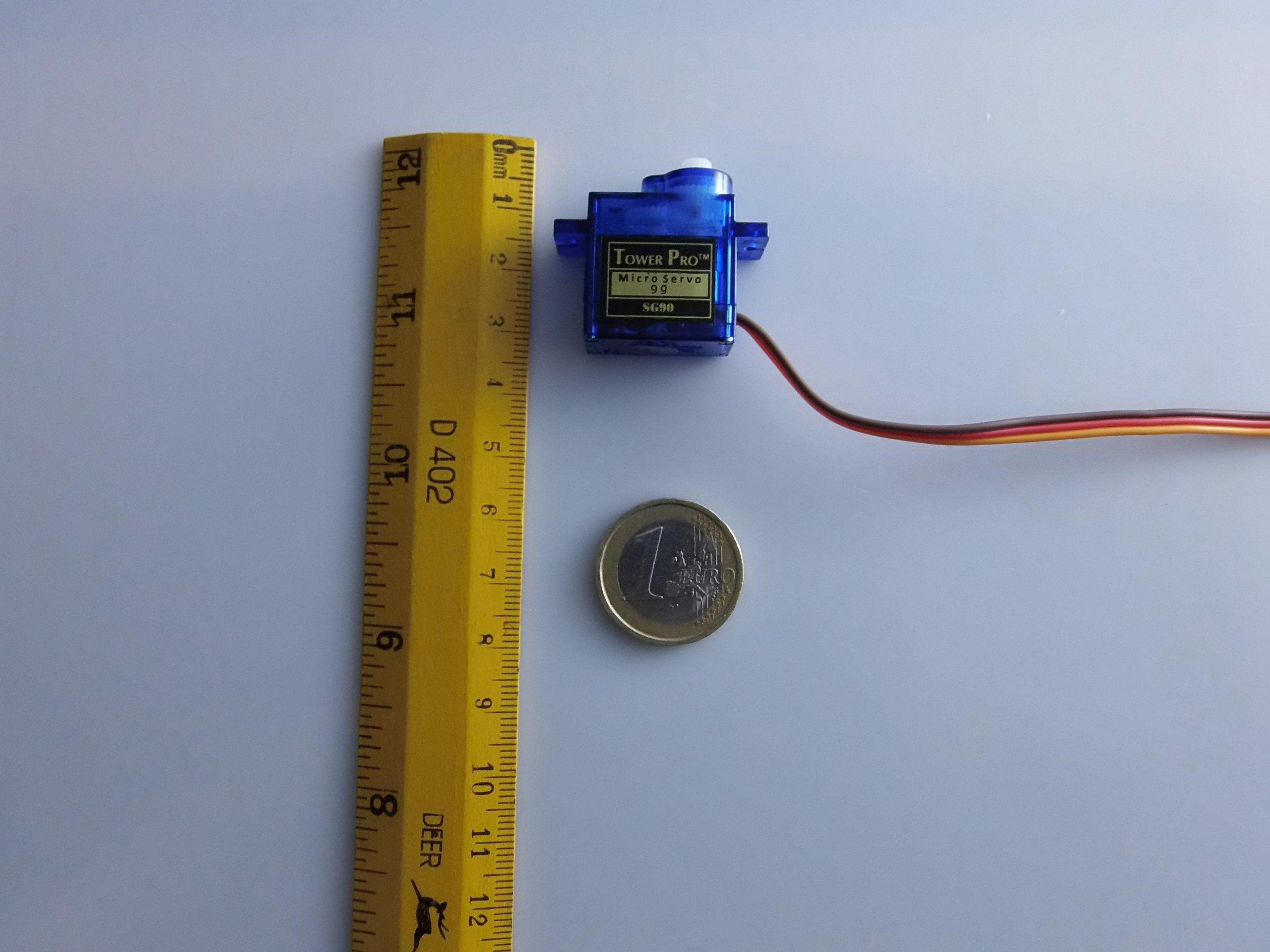
| Modello | SG90 Micro Servo |
| Peso | 9g |
| Coppia | 1.8 kg/cm (a 4.8V) |
| Tensione operativa | 4.8V – 6V |
| Angolo di rotazione | Circa 180° (limitato meccanicamente) |
| Velocità | 0.12 sec/60° (a 4.8V) |
| Tipo di controllo | PWM (modulazione a larghezza d’impulso) |
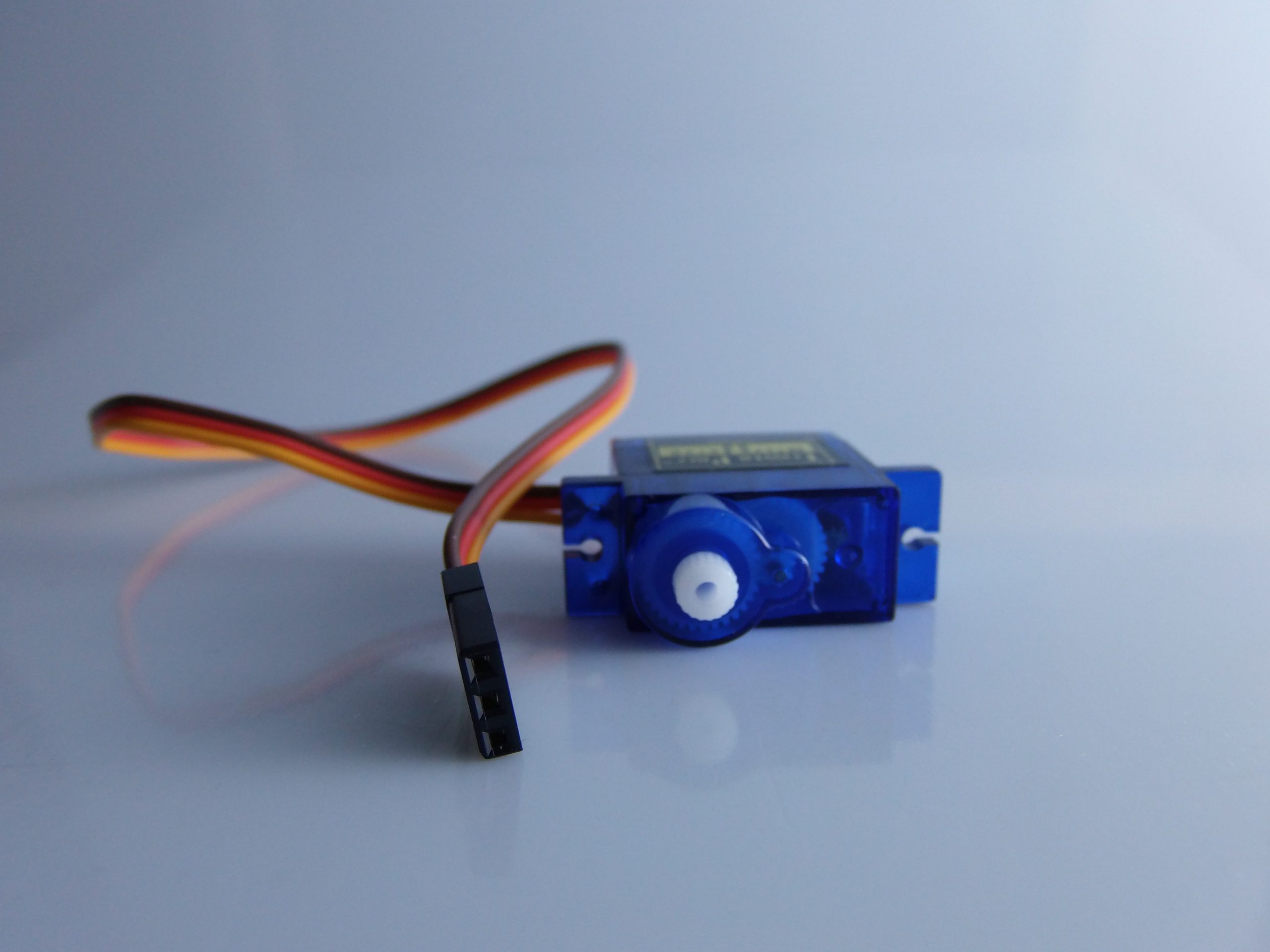
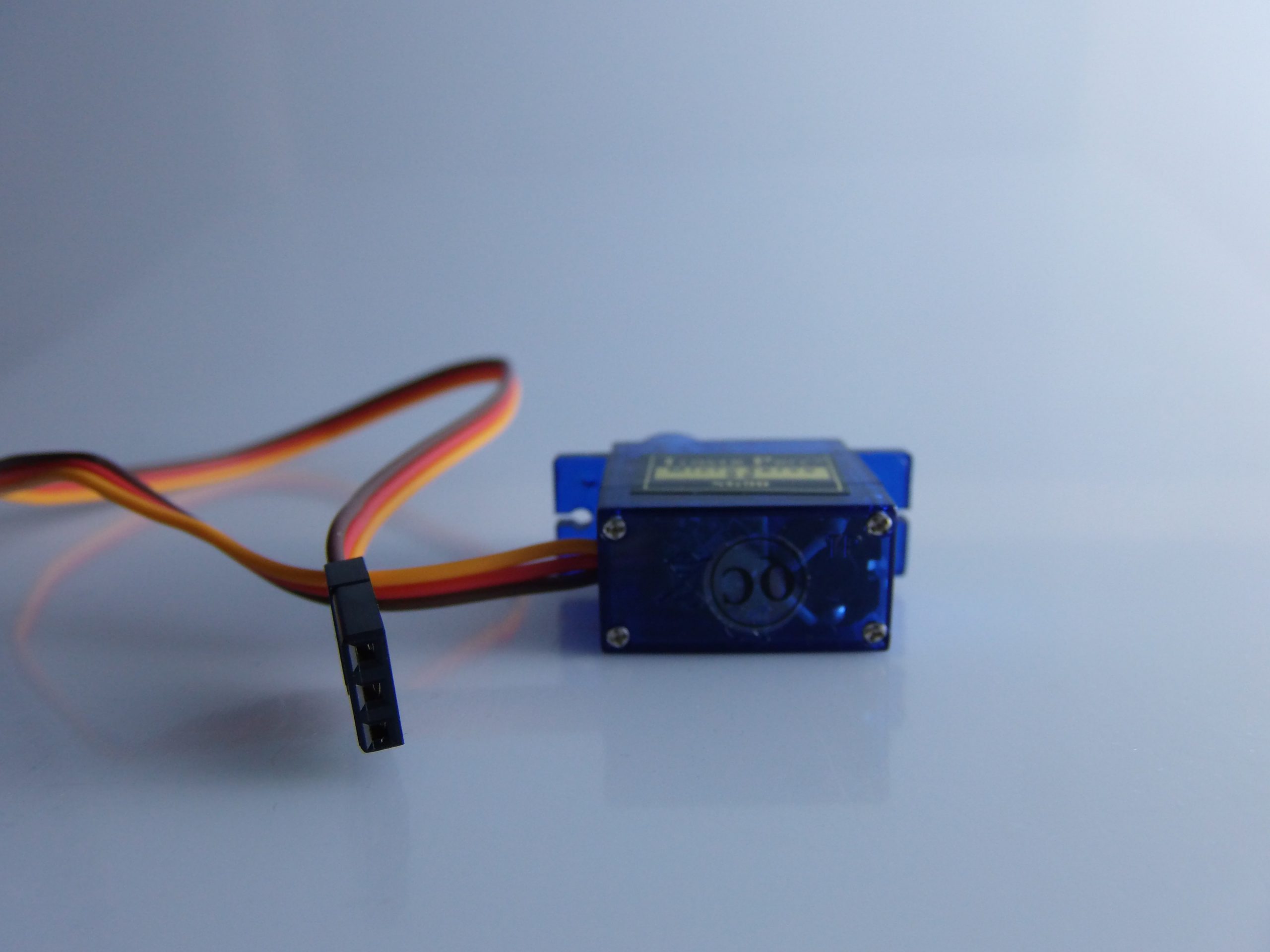
| Connettori | 3 pin: GND (marrone), VCC (rosso), segnale (arancione) |
| Materiale ingranaggi | Nylon |
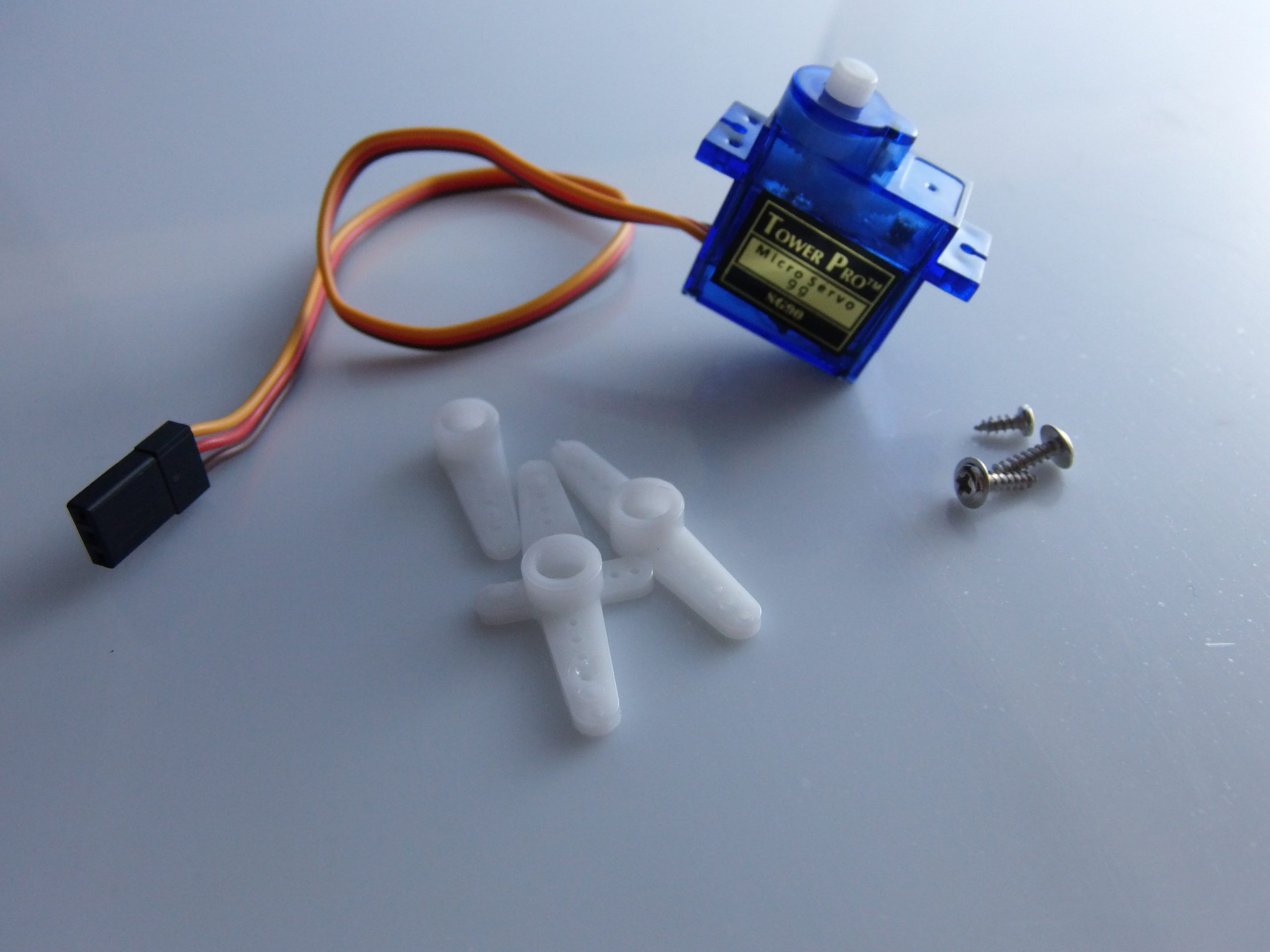
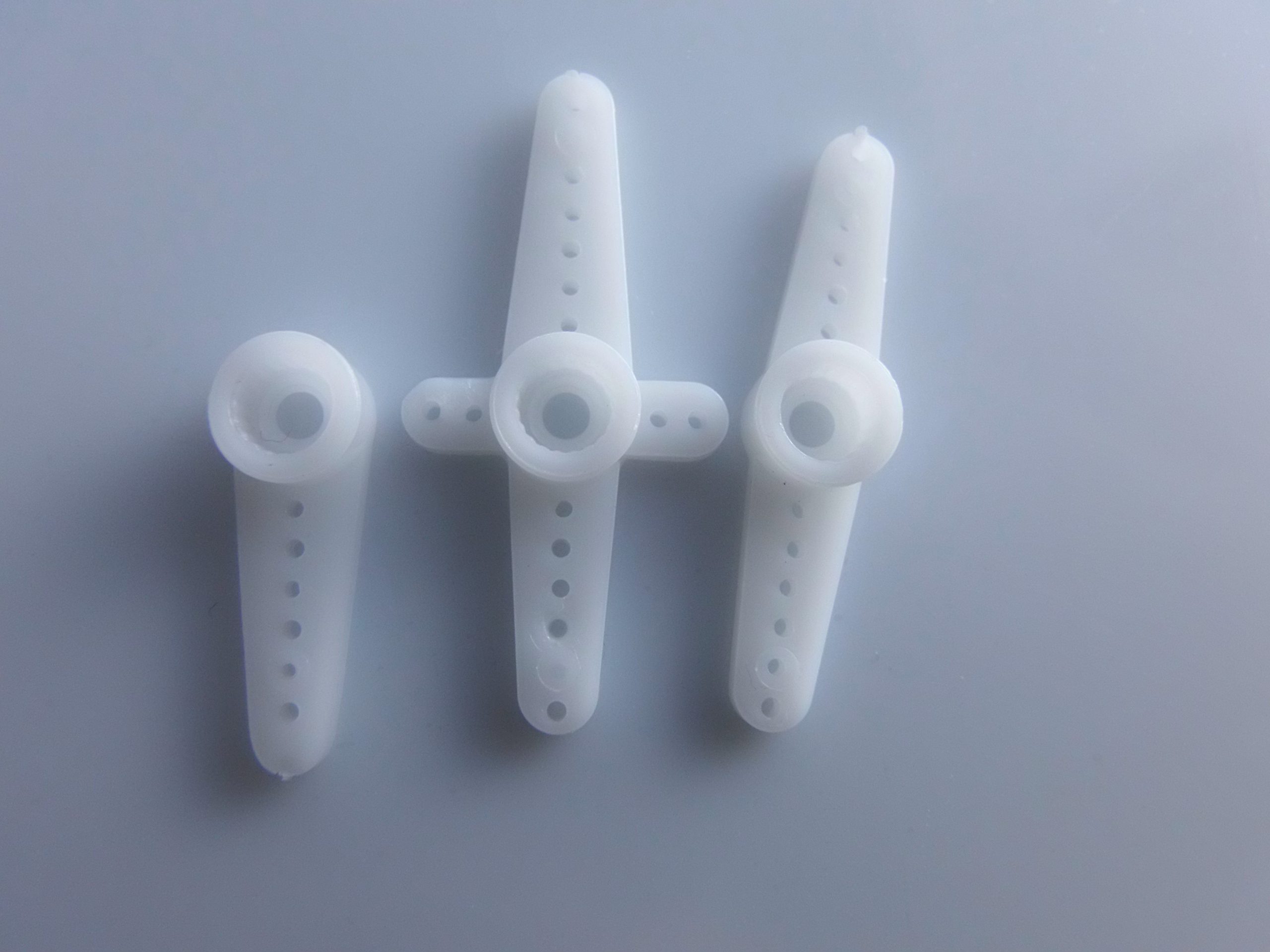
📦 Contenuto tipico della confezione:
- 1x Micro Servo SG90
- 3x Braccetti (horns)
- 3x Viti
🔌 Collegamento del Micro Servo SG90 con Arduino
| Servo | Arduino UNO |
|---|---|
| GND (marrone) | GND |
| VCC (rosso) | 5V |
| Segnale (arancione) | Pin digitale (es. D9) |
⚠️ Nota: Per più servomotori o carichi pesanti, usa un alimentatore esterno (5V) per evitare di sovraccaricare l’Arduino.
🔧 Libreria Necessaria
Arduino ha una libreria ufficiale chiamata Servo.h che semplifica molto l’uso dei servo.
📦 Installazione (se non già presente):
- Apri l’IDE Arduino
- Vai su: Sketch > Include Library > Manage Libraries…
- Cerca “Servo” e installa quella ufficiale di Arduino
🧪 Esempio di Codice Base
🎯 Obiettivo: Far ruotare il servo da 0° a 180° e ritorno
#include <Servo.h>
Servo mioServo; // Crea un oggetto servo
void setup() {
mioServo.attach(9); // Collega il servo al pin 9
}
void loop() {
for (int angolo = 0; angolo <= 180; angolo++) {
mioServo.write(angolo); // Imposta l'angolo
delay(15); // Attendi che il servo si muova
}
delay(500);
for (int angolo = 180; angolo >= 0; angolo--) {
mioServo.write(angolo);
delay(15);
}
delay(500);
}
💡 Esempi Avanzati di Utilizzo
📍 Controllo tramite potenziometro
#include <Servo.h>
Servo mioServo;
int potPin = A0; // Potenziometro collegato ad A0
void setup() {
mioServo.attach(9);
}
void loop() {
int lettura = analogRead(potPin); // Legge il valore (0–1023)
int angolo = map(lettura, 0, 1023, 0, 180); // Lo converte in gradi
mioServo.write(angolo);
delay(10);
}
🎮 Controllo via seriale
#include <Servo.h>
Servo mioServo;
void setup() {
Serial.begin(9600);
mioServo.attach(9);
Serial.println("Inserisci un angolo tra 0 e 180:");
}
void loop() {
if (Serial.available() > 0) {
int angolo = Serial.parseInt();
if (angolo >= 0 && angolo <= 180) {
mioServo.write(angolo);
Serial.print("Angolo impostato a: ");
Serial.println(angolo);
} else {
Serial.println("Valore non valido. Inserisci 0-180.");
}
}
}
📚 Consigli di Utilizzo
- Non forzare il servo oltre i suoi limiti meccanici (generalmente 0°–180°).
- Evita di alimentare più servo direttamente dal 5V di Arduino, usa un alimentatore esterno da 5V/2A per stabilità.
- I servo SG90 non sono adatti per rotazione continua: se ti serve un motore che ruoti liberamente, considera i servo a rotazione continua o i motoriduttori.
⚙️ Applicazioni Comuni
- Controllo timone/alettoni su modellini RC
- Movimento braccia robotiche
- Serrature elettroniche
- Meccanismi animatronici
- Puntamento sensori o camere (pan/tilt)
Perfetto! Espandiamo la guida per includere:
- ✅ Controllo Wireless con Bluetooth (HC-05)
- ✅ Controllo via Wi-Fi con ESP8266/ESP32
- ✅ Controllo di più servo contemporaneamente
- ✅ Integrazione con sensori (es. distanza ultrasuoni HC-SR04)
🟦 1. Controllo Wireless con Modulo Bluetooth HC-05
🎯 Obiettivo:
Comandare il servo SG90 via Bluetooth da un’app sullo smartphone (es. app come Serial Bluetooth Terminal su Android).
🔌 Collegamento HC-05:
| HC-05 | Arduino UNO |
|---|---|
| VCC | 5V |
| GND | GND |
| TXD | Pin 10 |
| RXD | Pin 11 (⚠️ con partitore di tensione a 3.3V) |
⚠️ Usa un partitore resistivo (1kΩ + 2kΩ) per abbassare il segnale da 5V a 3.3V verso l’RXD del modulo HC-05.
🔧 Codice Arduino con SoftwareSerial:
#include <Servo.h>
#include <SoftwareSerial.h>
Servo mioServo;
SoftwareSerial BT(10, 11); // RX, TX
void setup() {
mioServo.attach(9);
BT.begin(9600);
}
void loop() {
if (BT.available()) {
int angolo = BT.parseInt();
if (angolo >= 0 && angolo <= 180) {
mioServo.write(angolo);
}
}
}
🔄 Test: Invia da app mobile un numero tra 0 e 180.
🌐 2. Controllo Servo via Wi-Fi (ESP8266 o ESP32)
⚠️ Se usi ESP8266 o ESP32, NON usare Arduino UNO. I pin sono diversi e il servo va alimentato con cura.
🧠 Esempio con ESP8266 (NodeMCU):
- Servo → alimentato con fonte esterna 5V e GND condiviso
- Segnale → collegato a D1 (GPIO 5)
🔧 Codice base per web server che controlla il servo:
#include <ESP8266WiFi.h>
#include <Servo.h>
Servo mioServo;
const char* ssid = "TuaReteWiFi";
const char* password = "PasswordWiFi";
WiFiServer server(80);
void setup() {
mioServo.attach(D1); // GPIO 5
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
}
server.begin();
}
void loop() {
WiFiClient client = server.available();
if (client) {
String req = client.readStringUntil('r');
client.flush();
if (req.indexOf("/angle=") != -1) {
int angolo = req.substring(req.indexOf("=")+1).toInt();
if (angolo >= 0 && angolo <= 180) {
mioServo.write(angolo);
}
}
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println("");
client.println("<html><body>");
client.println("<h1>Controllo Servo</h1>");
client.println("<form>Angolo (0-180): <input type='number' name='angle'><input type='submit'></form>");
client.println("</body></html>");
}
}
💻 Vai all’indirizzo IP assegnato (es.
192.168.1.42) nel browser.
⚙️ 3. Controllare Più Servo Contemporaneamente
#include <Servo.h>
Servo servo1, servo2, servo3;
void setup() {
servo1.attach(9);
servo2.attach(10);
servo3.attach(11);
}
void loop() {
for (int ang = 0; ang <= 180; ang++) {
servo1.write(ang);
servo2.write(180 - ang);
servo3.write(ang / 2);
delay(15);
}
}
✅ Ogni
Servoviene collegato a un pin diverso. Arduino UNO può gestire fino a 12 servo, ma con limiti di alimentazione!
📏 4. Controllo Servo con Sensore di Distanza HC-SR04
🎯 Obiettivo:
Far muovere il servo in base alla distanza letta dal sensore ultrasuoni.
🔌 Collegamenti:
| Sensore HC-SR04 | Arduino |
|---|---|
| VCC | 5V |
| GND | GND |
| Trig | D7 |
| Echo | D6 |
🔧 Codice:
#include <Servo.h>
Servo mioServo;
const int trigPin = 7;
const int echoPin = 6;
void setup() {
Serial.begin(9600);
mioServo.attach(9);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
// Invio impulso
digitalWrite(trigPin, LOW); delayMicroseconds(2);
digitalWrite(trigPin, HIGH); delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long durata = pulseIn(echoPin, HIGH);
float distanza = durata * 0.034 / 2;
int angolo = map(distanza, 5, 100, 0, 180); // Da 5 cm a 100 cm
angolo = constrain(angolo, 0, 180);
mioServo.write(angolo);
delay(100);
}
🔚 Conclusione e Possibili Estensioni
✅ Ora puoi:
- Controllare il servo via Bluetooth, Wi-Fi o sensori
- Gestire più servo per robotica o bracci articolati
- Integrare input da remoto o ambiente (es. distanza, potenziometri)
Perfetto! Approfondiamo i due aspetti per un robot con braccio articolato controllato da servo SG90:
🦾 1. Sincronizzazione dei movimenti servo (Braccio Robotico)
🎯 Obiettivo:
Coordinare più servo (es. spalla, gomito, polso) per far compiere movimenti fluidi e sincronizzati a un braccio robotico.
🎮 Esempio: 3 DOF (gradi di libertà)
🔌 Collegamenti:
| Parte del braccio | Servo | Pin Arduino |
|---|---|---|
| Spalla | servo1 | 9 |
| Gomito | servo2 | 10 |
| Polso | servo3 | 11 |
🔧 Codice sincronizzato:
#include <Servo.h>
Servo servoSpalla;
Servo servoGomito;
Servo servoPolso;
void setup() {
servoSpalla.attach(9);
servoGomito.attach(10);
servoPolso.attach(11);
}
void loop() {
// Esegui una sequenza sincrona
for (int ang = 0; ang <= 90; ang++) {
servoSpalla.write(ang);
servoGomito.write(90 - ang);
servoPolso.write(ang / 2);
delay(20); // Tempo per il movimento fluido
}
delay(1000); // Pausa
for (int ang = 90; ang >= 0; ang--) {
servoSpalla.write(ang);
servoGomito.write(90 - ang);
servoPolso.write(ang / 2);
delay(20);
}
delay(1000);
}
✅ Tutti i servomotori si muovono in modo coordinato e si possono modificare le relazioni per creare movimenti articolati.
💾 2. Memorizzazione delle posizioni servo
🧠 Obiettivo:
Salvare delle “pose” del braccio robotico in memoria (EEPROM) o da inviare via seriale, per poi richiamarle con un comando.
📦 Soluzione 1: Memorizzare in EEPROM (persistente dopo riavvio)
#include <Servo.h>
#include <EEPROM.h>
Servo s1, s2, s3;
void setup() {
s1.attach(9);
s2.attach(10);
s3.attach(11);
// Carica posizione salvata all'avvio
int a1 = EEPROM.read(0);
int a2 = EEPROM.read(1);
int a3 = EEPROM.read(2);
s1.write(a1);
s2.write(a2);
s3.write(a3);
delay(1000);
}
void loop() {
// Sposta braccio in nuova posizione
s1.write(60);
s2.write(120);
s3.write(90);
delay(2000);
// Salva questa "pose" nella EEPROM
EEPROM.write(0, 60); // s1
EEPROM.write(1, 120); // s2
EEPROM.write(2, 90); // s3
while (1); // Ferma il loop
}
💾 Quando riavvii Arduino, il braccio tornerà nella posizione salvata.
📦 Soluzione 2: Inviare pose da Serial Monitor e salvarle in RAM
#include <Servo.h>
Servo s1, s2, s3;
int pos[3];
void setup() {
Serial.begin(9600);
s1.attach(9);
s2.attach(10);
s3.attach(11);
Serial.println("Invia tre valori separati da virgole (es. 30,90,120):");
}
void loop() {
if (Serial.available()) {
String input = Serial.readStringUntil('n');
input.trim();
int idx1 = input.indexOf(',');
int idx2 = input.lastIndexOf(',');
if (idx1 > 0 && idx2 > idx1) {
pos[0] = input.substring(0, idx1).toInt();
pos[1] = input.substring(idx1 + 1, idx2).toInt();
pos[2] = input.substring(idx2 + 1).toInt();
s1.write(pos[0]);
s2.write(pos[1]);
s3.write(pos[2]);
Serial.println("Posizione eseguita.");
} else {
Serial.println("Formato errato. Usa: ang1,ang2,ang3");
}
}
}
📱 Puoi inviare pose da PC o Bluetooth. Esempio:
45,90,135
➕ Estensione Avanzata (Opzionale)
✅ Memorizzare più pose in EEPROM con tasti per richiamarle
✅ Salvare sequenze animate per playback
✅ Interfaccia via web (ESP32) per programmare movimenti da browser
✅ Joystick per controllare il braccio in tempo reale e poi “registrare”
🔚 Conclusione
Con queste soluzioni puoi:
- Far muovere il braccio come un sistema articolato
- Memorizzare pose o sequenze personalizzate
- Integrare con comandi da remoto (Bluetooth, Wi-Fi o seriale)
[/vc_column_text][/vc_column][/vc_row]
Informazioni aggiuntive
| Peso | 21 g |
|---|
Prodotti correlati
-
In offerta!

Motorino elettrico N20 con motoriduttore con Ingranaggi in Metallo
Il prezzo originale era: 9,10 €.6,64 €Il prezzo attuale è: 6,64 €. Escluso IVA Aggiungi al carrello -
In offerta!

755 Motore Alta Velocità 6V 14V 22022 RPM
Il prezzo originale era: 16,56 €.12,00 €Il prezzo attuale è: 12,00 €. Escluso IVA Aggiungi al carrello -
In offerta!

Schermo Touch NDSI Nintendo LCD parte inferiore ricambio
Il prezzo originale era: 7,68 €.5,56 €Il prezzo attuale è: 5,56 €. Escluso IVA Aggiungi al carrello -
In offerta!

S3003 Servo Motore Alta Coppia per Futaba RC Auto robo
Il prezzo originale era: 6,84 €.4,95 €Il prezzo attuale è: 4,95 €. Escluso IVA Aggiungi al carrello
