In offerta!





Micro Motore 1.5v – 9v 300 Motore per pannelli solari
Il prezzo originale era: 5,84 €.3,38 €Il prezzo attuale è: 3,38 €. Escluso IVA
Micro Motore 1.5v – 9v 300 Motore per pannelli solari
Disponibile su ordinazione
Descrizione
[vc_row][vc_column][vc_column_text]
📌 Descrizione tecnica – Micro Motore 1.5V–9V tipo 300
Nome comune:
Micro motore DC tipo 300 (o “Motor 300”)
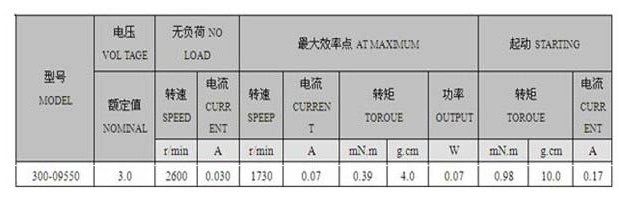
Tensione operativa:
- Minima: 1.5 V
- Nominale: 3 V – 6 V
- Massima: 9 V (oltre, si riduce la vita utile)
Consumo di corrente (indicativo):
- A vuoto: 50–100 mA (a 3–6 V)
- Sotto carico: 150–400 mA (può arrivare a 1 A in stallo)
Velocità (RPM, a vuoto):
- ~3.000 giri/min a 3 V
- ~6.000 giri/min a 6 V
- ~9.000 giri/min a 9 V
Coppia:
- Circa 10–30 g·cm (bassa, motore ad alta velocità, bassa coppia)
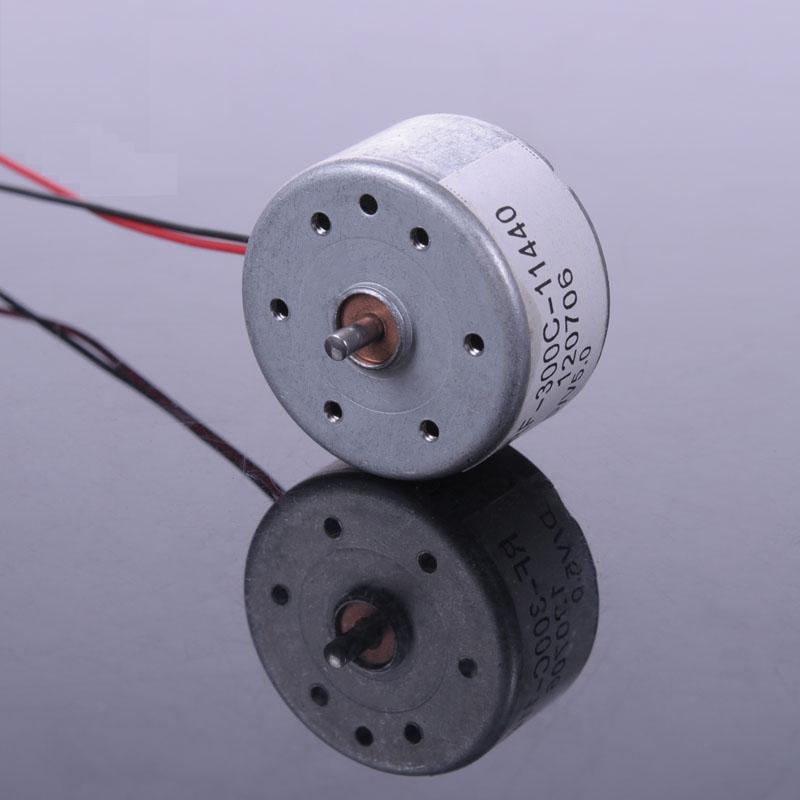
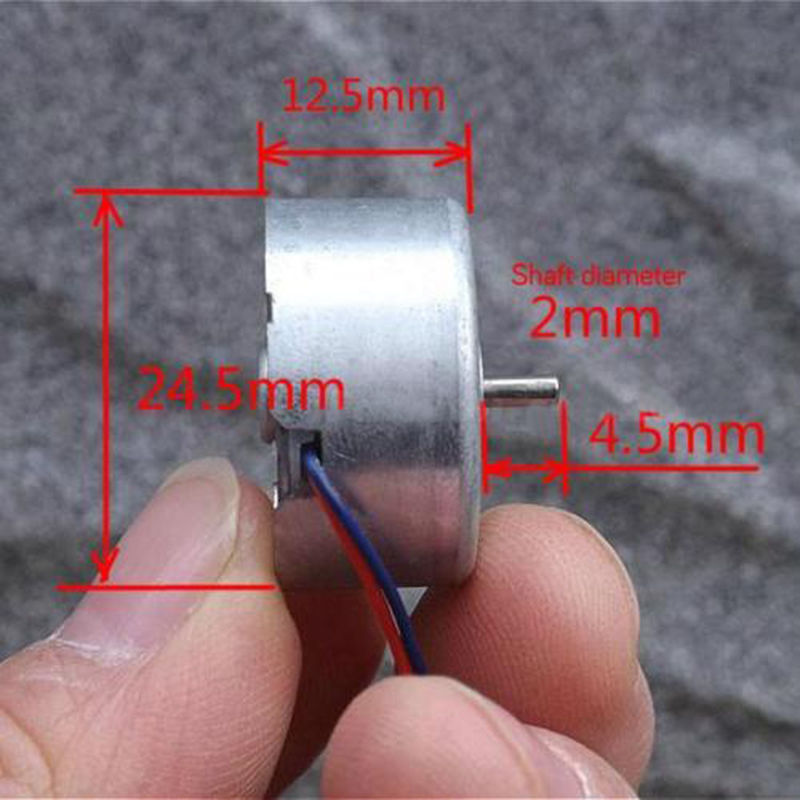
Dimensioni tipiche:
- Lunghezza corpo: ~27 mm
- Diametro: ~20 mm
- Albero: diametro 2 mm, lunghezza 8–10 mm
Applicazioni tipiche:
- Piccoli robot
- Giranti per ventilatori mini
- Modelli solari
- Esperimenti scolastici
🔌 Come collegarlo ad Arduino
⚠️ Nota importante:
Arduino non può alimentare direttamente il motore dal pin digitale. I pin erogano massimo 40 mA, mentre il motore richiede molto di più.
Serve un driver per motori o un transistor di potenza.
Opzione 1 – Con transistor NPN (es. 2N2222, BC337 o TIP120)
Materiale:
- Arduino Uno (o simile)
- Micro Motore 1.5V–9V tipo 300
- Transistor NPN
- Diodo 1N4007 (protezione da tensioni inverse)
- Resistenza 220 Ω
- Alimentatore esterno (3–6 V)
- Breadboard e cavetti
Schema:
- Collettore → un polo del motore
- Altro polo del motore → + alimentazione esterna
- Emettitore → GND comune con Arduino
- Resistenza 220 Ω dal pin digitale Arduino alla base del transistor
- Diodo in parallelo al motore (catodo verso positivo, anodo verso transistor)
Opzione 2 – Con driver L293D o L298N
- Permette di invertire la direzione di rotazione
- Supporta due motori contemporaneamente
- Si collega facilmente usando alimentazione esterna per il motore e pin digitali per il controllo
💻 Programmazione Arduino
Esempio 1 – Accendere/Spegnere il motore (transistor NPN)
int motorPin = 9; // pin collegato alla base tramite resistenza
void setup() {
pinMode(motorPin, OUTPUT);
}
void loop() {
digitalWrite(motorPin, HIGH); // accende il motore
delay(2000); // per 2 secondi
digitalWrite(motorPin, LOW); // spegne il motore
delay(2000); // per 2 secondi
}
Esempio 2 – Controllo velocità con PWM
int motorPin = 9; // pin PWM
void setup() {
pinMode(motorPin, OUTPUT);
}
void loop() {
for (int speed = 0; speed <= 255; speed += 5) {
analogWrite(motorPin, speed); // aumenta gradualmente la velocità
delay(50);
}
for (int speed = 255; speed >= 0; speed -= 5) {
analogWrite(motorPin, speed); // diminuisce gradualmente
delay(50);
}
}
Esempio 3 – Con inversione di direzione (L293D)
int motorPin1 = 9;
int motorPin2 = 8;
void setup() {
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
}
void loop() {
// Rotazione in avanti
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
delay(2000);
// Rotazione inversa
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
delay(2000);
// Stop
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
delay(1000);
}
📋 Consigli pratici
- Non superare la tensione nominale per lunghi periodi (meglio stare sui 3–6 V).
- Se alimentato da pannello solare, ricordati che la tensione varia con la luce: meglio aggiungere un condensatore per stabilizzare.
- Se serve più coppia, aggiungi un riduttore meccanico.
- Usa sempre un diodo di protezione contro il ritorno di corrente del motore.
[/vc_column_text][/vc_column][/vc_row]
Informazioni aggiuntive
| Peso | 35 g |
|---|
Prodotti correlati
-
In offerta!
2 Pezzi Slot Connettori Per SD Card Per PCB
Il prezzo originale era: 2,24 €.1,72 €Il prezzo attuale è: 1,72 €. Escluso IVA Aggiungi al carrello -
In offerta!

BTS7960 43A Driver Controllo Motore Ponte H Alta Potenza H-Bridge Smart Car, Robot, Rover, Arduino
Il prezzo originale era: 21,85 €.15,84 €Il prezzo attuale è: 15,84 €. Escluso IVA Aggiungi al carrello -
In offerta!

L298N Dual Stepper Motor Driver Scheda di Controllo Modulo 5V per Robot Smart Car
Il prezzo originale era: 6,51 €.4,05 €Il prezzo attuale è: 4,05 €. Escluso IVA Aggiungi al carrello -
In offerta!

S3003 Servo Motore Alta Coppia per Futaba RC Auto robo
Il prezzo originale era: 6,84 €.4,95 €Il prezzo attuale è: 4,95 €. Escluso IVA Aggiungi al carrello