


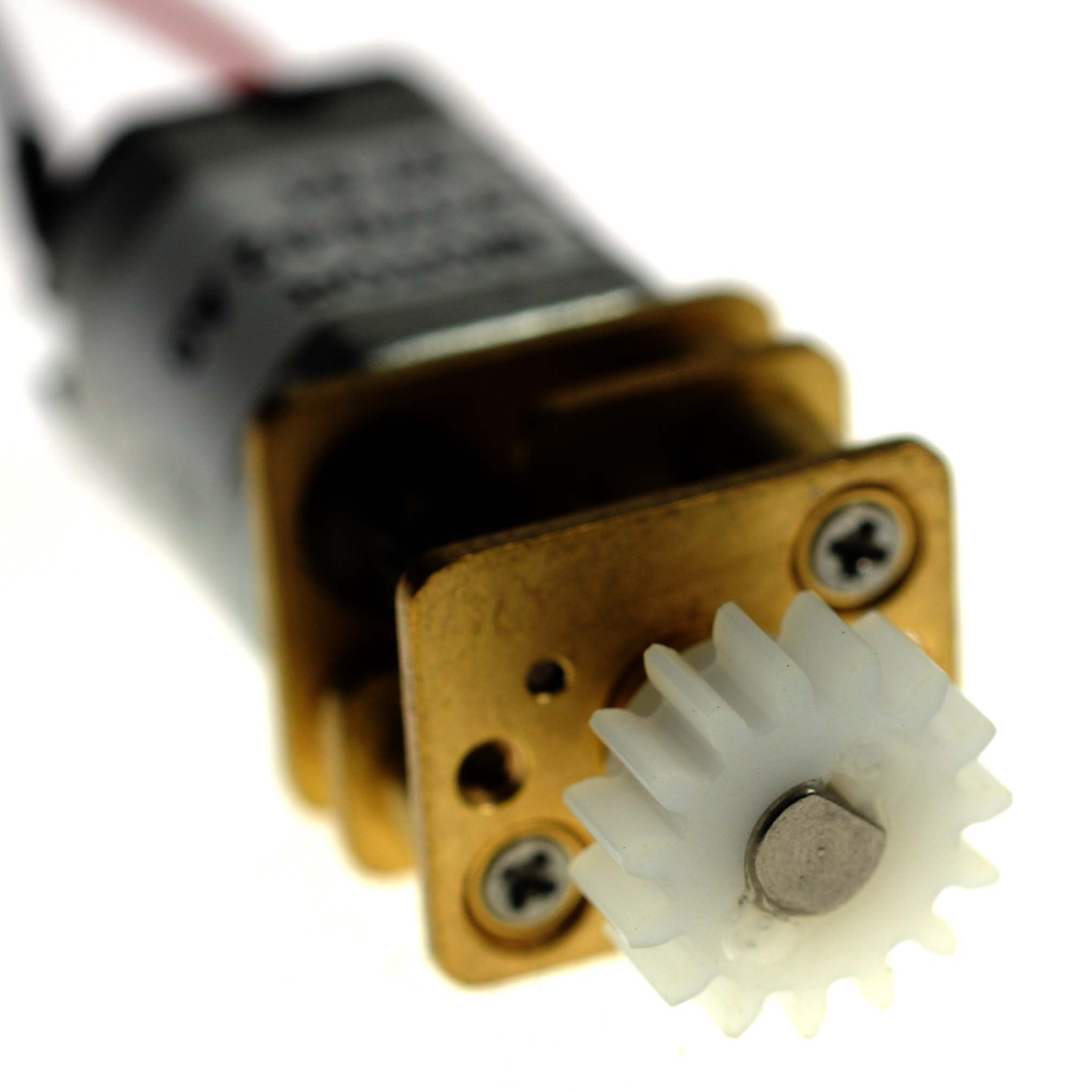
Motorino elettrico N20 con motoriduttore e Ingranaggi in Metallo con Mandrino in Plastica
Il prezzo originale era: 7,73 €.5,60 €Il prezzo attuale è: 5,60 €. Escluso IVA
Motorino elettrico N20 con motoriduttore e Ingranaggi in Metallo con Mandrino in Plastica
Disponibile su ordinazione
Descrizione
[vc_row][vc_column][vc_column_text]
1. Descrizione del modulo N20 con motoriduttore e mandrino
Caratteristiche principali
- Tipo di motore: Motore DC miniatura N20
- Tensione di funzionamento tipica: 3 V – 12 V DC (versione più comune: 6 V o 12 V)
- Corrente a vuoto: ~ 40–200 mA (dipende dal carico e dalla tensione)
- Corrente di stallo: ~ 1–1,5 A (attenzione a non superare il limite del driver)
- Velocità nominale: variabile in base al rapporto di riduzione (es. 100 rpm, 200 rpm, 600 rpm, ecc.)
- Coppia: elevata grazie al motoriduttore
- Motoriduttore: ingranaggi interni in metallo per maggiore resistenza
- Mandrino in plastica: montato sull’albero di uscita per collegare direttamente piccole punte, ruote, eliche o accessori
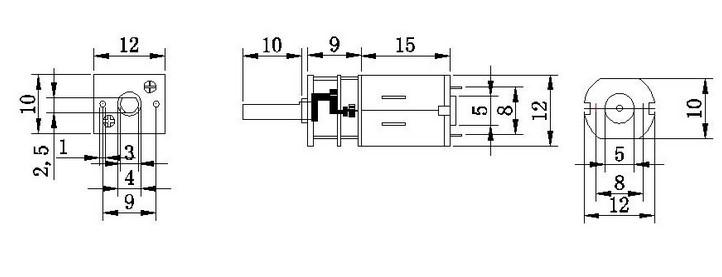
- Dimensioni tipiche del corpo motore: 12 × 10 × 15 mm (solo motore) + lunghezza riduttore
2. Come funziona
Il motore N20 è un motore DC a spazzole, quindi funziona semplicemente alimentandolo con corrente continua.
Il motoriduttore riduce la velocità e aumenta la coppia.
Il mandrino in plastica serve come supporto per fissare utensili o elementi rotanti.
Nota: essendo un motore DC, non può essere collegato direttamente ad Arduino, perché richiede più corrente di quella che i pin possono fornire. Serve un driver per motori o un ponte H (es. L298N, L293D, TB6612FNG o un MOSFET).
3. Collegamento con Arduino
Materiale necessario
- Arduino UNO/Nano/Leonardo
- Modulo driver motore (es. L298N o TB6612FNG)
- Alimentatore per motore (batteria LiPo 7,4 V, 6 × AA, o alimentatore 6–12 V)
- Cavi jumper
- Breadboard (opzionale)
Schema con TB6612FNG (consigliato)
Arduino TB6612FNG N20
--------------------------------------------
Pin 9 ---------- PWMA
Pin 8 ---------- AIN2
Pin 7 ---------- AIN1
5V ---------- VCC
GND ---------- GND
Motor A terminals -------------- Motore N20
VM ---------- +6V / +12V da alimentatore esterno
GND ---------- GND alimentatore esterno (comune con Arduino)
Il pin PWMA controlla la velocità (PWM), AIN1 e AIN2 controllano la direzione.
4. Esempio base di codice Arduino
// Controllo N20 con TB6612FNG
int PWMA = 9; // PWM velocità
int AIN1 = 7; // Direzione
int AIN2 = 8; // Direzione
void setup() {
pinMode(PWMA, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
}
void loop() {
// Ruota in avanti a metà velocità
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
analogWrite(PWMA, 128); // 0-255
delay(2000);
// Stop
analogWrite(PWMA, 0);
delay(1000);
// Ruota indietro a massima velocità
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
analogWrite(PWMA, 255);
delay(2000);
// Stop
analogWrite(PWMA, 0);
delay(2000);
}
5. Esempi di utilizzo pratico
- Robotica: ruote di piccoli robot, piattaforme mobili
- Meccanismi automatici: serrature elettriche, sistemi di apertura
- Mini trapani o avvitatori: grazie al mandrino, può tenere punte o accessori
- Progetti di modellismo: barche, macchine in scala, eliche
- Meccanismi scenografici: movimenti lenti e controllati
6. Consigli d’uso
- Non alimentare direttamente dal pin 5V di Arduino: rischi di bruciare la scheda
- Usa sempre un alimentatore separato per il motore
- Condividi il GND tra Arduino e il driver del motore
- Se usi un rapporto di riduzione molto alto (es. <100 rpm) avrai più coppia ma meno velocità
- Non bloccare l’albero durante il funzionamento: il motore può surriscaldarsi
[/vc_column_text][/vc_column][/vc_row]
Prodotti correlati
-
In offerta!

755 Motore Alta Velocità 6V 14V 22022 RPM
Il prezzo originale era: 16,56 €.12,00 €Il prezzo attuale è: 12,00 €. Escluso IVA Aggiungi al carrello -
In offerta!

Motorino elettrico N20 con motoriduttore con Ingranaggi in Metallo
Il prezzo originale era: 9,10 €.6,64 €Il prezzo attuale è: 6,64 €. Escluso IVA Aggiungi al carrello -
In offerta!

TT Motore 6V con Ruota e Riduttore
Il prezzo originale era: 6,28 €.3,82 €Il prezzo attuale è: 3,82 €. Escluso IVA Aggiungi al carrello -
In offerta!

TB6560 3A Driver Controllo / Accensione Motore Passo Passo Regolabile per CNC Singolo Asse
Il prezzo originale era: 12,16 €.8,81 €Il prezzo attuale è: 8,81 €. Escluso IVA Aggiungi al carrello